Неопределившиеся килоботы помогли определиться всему рою
В некоторых условиях наличие неопределившихся участников роя роботов при принятии двоичных решений (А или Б) замедляет приход роя к консенсусу, но, в конечном итоге, позволяет достичь его, в отличие от роя, в котором все роботы имеют сформированное мнение, выяснили ученые из Бристольского университета. Исследование было представлено на конференции IROS 2017 в Канаде.
Принятие единого решения в группе, отдельные участники которой придерживаются разных мнений, довольно сложная задача. Одно из относительно новых направлений, изучающих эту проблему — робототехника. Некоторые инженеры занимаются разработкой специальных тактик для группового взаимодействия, например, дронов. Также существуют и чисто исследовательские проекты, занимающиеся разработкой оптимальных алгоритмов децентрализованного принятия решений.
Как и в некоторых других подобных проектах, в новой работе исследователи использовали в качестве модельных объектов набор килоботов. Каждый такой робот имеет размер в несколько сантиметров, оснащен светодиодами и инфракрасными датчиками для взаимодействия, и приводится в движение двумя вибромоторами. Исследователи расположили 400 килоботов на квадратном поле с длиной стороны 1,2 метра, на котором они двигались в случайных направлениях.
Исследователи решили изучить различные механизмы, позволяющие стае килоботов с разными мнениями приходить к единому решению. Во время экспериментов каждый робот находился в одном из двух состояний: сигнализирующем или обновляющемся. Исследователи сравнивали две модели принятия решений. В первой каждый робот в сигнализирующем состоянии придерживался мнения А или Б, причем для того, чтобы они в конечном счете пришли к консенсусу, исследователи создали перевес за счет того, что об мнении А робот сообщал дольше, чем о мнении Б. В состоянии обновления робот перенимал мнение большинства соседей и снова переходил в сигнализирующее состояние.
 Michael Crosscombe / YouTube
Michael Crosscombe / YouTube
Во второй модели исследователи добавили третье состояние — неопределенность. Оно возникало, когда соседние роботы придерживались противоположных мнений. Также в обоих моделях присутствовало и 10 процентов «сломанных» роботов, которые выбирали мнение случайным образом, не основываясь на показаниях соседей.
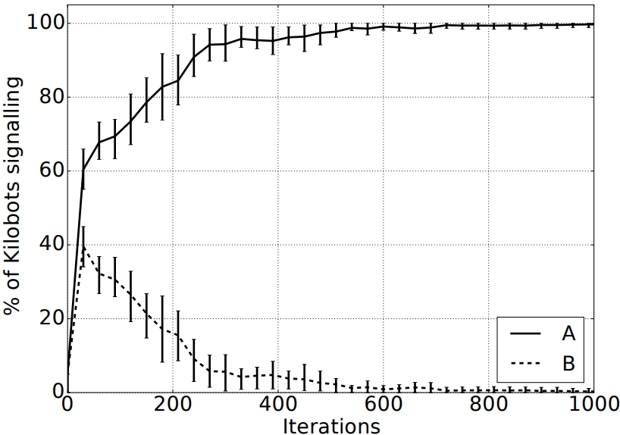 Достижение консенсуса в модели с тремя мнениями (А, Б, не определился). Crosscombe et al. / IROS 2017
Достижение консенсуса в модели с тремя мнениями (А, Б, не определился). Crosscombe et al. / IROS 2017
Проведя серию компьютерных симуляций и экспериментов с реальными роботами, исследователи выяснили, что при наличии неопределившихся роботов, рой (без учета «сломанных» роботов) приходил к единому мнению, тогда как в модели с роботами, имеющими четкое мнение, доля сторонников мнения А быстрее поднялась до примерно 90 процентов, но не поднималась выше. Таким образом исследователи сделали вывод, что наличие третьего мнения (неопределенности) оптимально для использования в группах роботов, которые могут выходить из строя.
Недавно инженеры из Гарвардского университета разработали метод коллективного взаимодействия килоботов, который позволяет им организовываться в определенные формы, выгоняя лишних роботов из стаи.
Автор: Григорий Копиев
- Источник(и):
- Войдите на сайт для отправки комментариев
