Дрон-моноцикл прошелся колесом через узкое место. Квадрокоптер способен преодолеть по земле в 3,8 раза большую дистанцию, чем в режиме полета
Инженеры из Китая разработали дрон-моноцикл, способный и летать, и передвигаться по поверхности земли используя, для этого колесо большого диаметра, расположенное под рамой. Плоскость вращения колеса при этом параллельна плоскостям вращения пропеллеров, поэтому в колесном режиме винты помогают поддерживать равновесие и маневрировать. В режиме моноцикла беспилотник может преодолевать узкие места на пути, а также экономит энергию — он способен проехать в 3,8 раза большую дистанцию по земле.
Препринт работы опубликован на arXiv.org.
Дроны имеют очевидное преимущество перед наземными колесными роботами — они обладают большей свободой перемещения, так как могут просто облететь появившиеся на пути препятствия. Наземные же роботы при передвижении существенно зависят от рельефа местности и свойств ее поверхности, но при этом они экономнее расходуют энергию — для дронов затратно даже просто оставаться на месте. Инженеры давно экспериментируют с гибридными устройствами, чтобы объединить преимущества ездящих роботов и летающих.
Например, специалисты из Корейского института передовых технологий построили полноценный гибрид квадрокоптера и колесного робота. Он представляет собой квадрокоптер с четырьмя колесами с независимым приводом. Этот дрон может ездить по земле, не задействуя пропеллеры, а препятствия просто он перелетает.
Другой подход выбрали инженеры из Университета Гонконга. Они оснастили двухвинтовой дрон пассивным колесом, опираясь на которое бикоптер может катиться по земле, сохраняя вертикальное положение, равновесие и управление за счет работающих винтов. Это позволяет экономить энергию, так как винты при этом работают на меньших по сравнению с полетом оборотах. Правда, такой гибрид не способен надолго останавливаться на одном месте, так как вынужден расходовать энергию на поддержание равновесия.
Инженеры из Чжэцзянского университета под руководством Чжи Чжэня (Zhi Zheng) предложили свой вариант конструкции гибридного дрона массой 1,5 килограмма. Он построен на базе квадрокоптера, под рамой которого установлено одно колесо. Плоскость вращения этого колеса параллельна плоскости вращения пропеллеров дрона, а диаметр составляет 36 сантиметров, при том что ширина самого квадрокоптера лишь 22 сантиметра. В движение колесо приводится с помощью отдельного сервомотора с трансмиссией.
 Конструкция дрона: (1) колесо, (2) подшипник, (3) зубчатые колеса, (4) вал, (5) сервомотор, (6) встроенный компьютер, (7) контроллер полета и электронный регулятор скорости, (8) батарея, (9) квадрокоптерная рама, (10) трехлопастные винты, (11) плита опорной рамы, (12) опоры, (13) вид сверху, (14) боковой вид / Zhi Zheng et al. / arxiv.org, 2023
Конструкция дрона: (1) колесо, (2) подшипник, (3) зубчатые колеса, (4) вал, (5) сервомотор, (6) встроенный компьютер, (7) контроллер полета и электронный регулятор скорости, (8) батарея, (9) квадрокоптерная рама, (10) трехлопастные винты, (11) плита опорной рамы, (12) опоры, (13) вид сверху, (14) боковой вид / Zhi Zheng et al. / arxiv.org, 2023
Чтобы перейти из полетного режима в наземный или обратно, дрону необходимо совершить маневр переворота. Для этого алгоритм управления увеличивает тягу только двух пропеллеров из четырех, расположенных с одной стороны, чтобы дрон мог развернуться набок и встать на колесо, или, напротив, повернуться пропеллерами вверх для полета.
В наземной конфигурации удерживать равновесие и не падать дрону помогают две дополнительные опоры на раме квадрокоптера с противоположной от колеса стороны. Для поворотов и маневрирования при движении по земле, а также для компенсации моментов, возникающих из-за несимметричного расположения колеса, используется разнонаправленная тяга пар передних и задних по отношению к направлению движения воздушных винтов дрона, которые в наземной конфигурации оказываются сбоку.
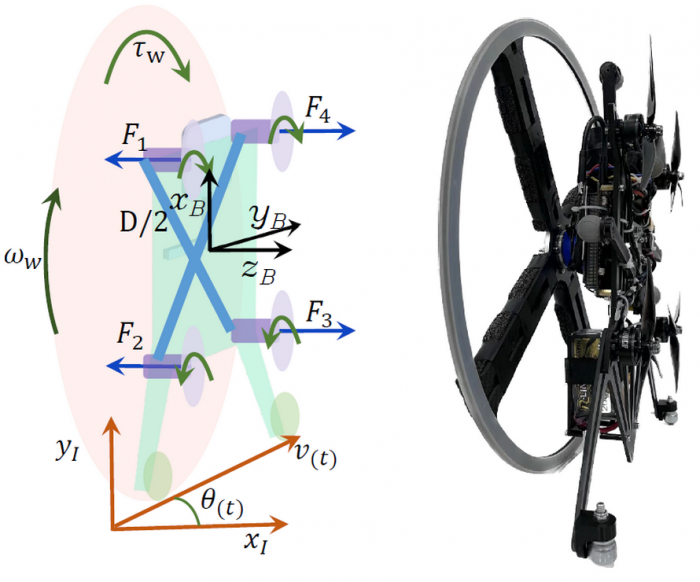 Динамическая модель движения дрона по поверхности / Zhi Zheng et al. / arxiv.org, 2023
Динамическая модель движения дрона по поверхности / Zhi Zheng et al. / arxiv.org, 2023
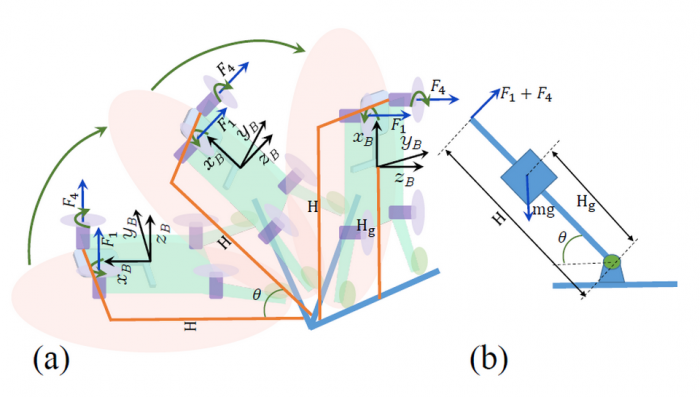 Модель перехода из полетного режима в наземный / Zhi Zheng et al. / arxiv.org, 2023
Модель перехода из полетного режима в наземный / Zhi Zheng et al. / arxiv.org, 2023
Благодаря такой конструкции дрон при движении по земле имеет ширину всего лишь 12 сантиметров и может успешно преодолевать узкие места на своем пути. В испытаниях, которые проводились в помещении, дрон смог преодолеть ворота шириной 18 сантиметров. Другое важное преимущество связано с низким энергопотреблением. В режиме моноцикла дрон оказался способен проехать дистанцию в 3,8 раза большую, чем в полете, и проработать по времени в 42,2 раза дольше, чем в режиме полета.
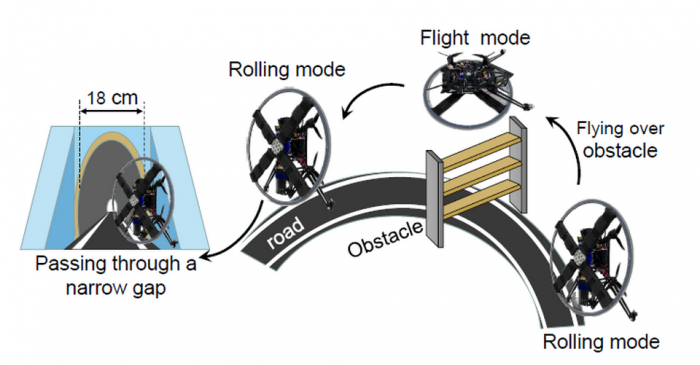 Дрон может передвигаться по поверхности на моноколесе, проходить через тесные пространства и облетать препятствия, встречающиеся на пути, переходя в полетный режим / Zhi Zheng et al. / arxiv.org, 2023
Дрон может передвигаться по поверхности на моноколесе, проходить через тесные пространства и облетать препятствия, встречающиеся на пути, переходя в полетный режим / Zhi Zheng et al. / arxiv.org, 2023
В будущем инженеры планируют улучшить алгоритмы управления, особенно отвечающие за переход между наземным и полетным режимами, так как в данный момент еще высок процент неудачных попыток. Также планируется снизить массу дрона и еще больше повысить его энергоэффективность.
- Источник(и):
- Войдите на сайт для отправки комментариев
