Микрокрабы нагрелись от лазера и побежали в сторону
Китайские и американские ученые научились создавать субмиллиметровых роботов, приводимых в движения лазером, например, робокрабов размером около полумиллиметра. Излучение разогревает конечности робота и заставляет их двигаться, после чего излучение пропадает и конечность возвращает исходную форму.
Статья опубликована в Science Robotics.
Ученые и инженеры давно работают над созданием роботов миллиметровых и даже микрометровых размеров. Одно из самых перспективных их применений — медицина, где роботы могли бы доставлять лекарство в нужные участки организма. И хотя методы изготовления структур такого размера давно развиты, создание на этих масштабах актуаторов — довольно трудная задача. Зачастую вместо этого легче использовать внешний источник движения, обычно это магнитное поле.
Ученые под руководством Джона Роджерса (John Rogers) из Северо-Западного университета (США) разработали метод создания микророботов и актуаторов, управляемых сканирующими лазерными импульсами.
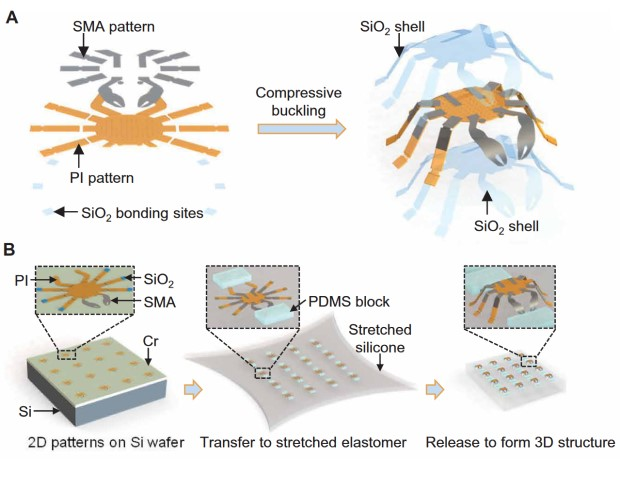
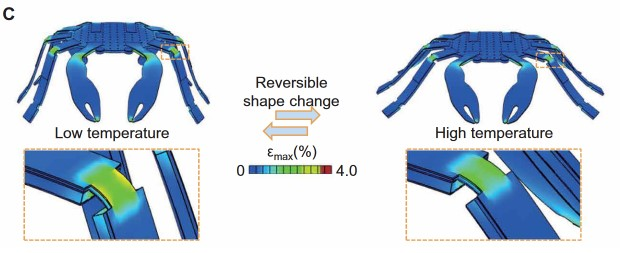
Для создания робота сначала берется силиконовая подложка с нанесенными на нее прямоугольными блоками из полидиметилсилоксана. Параллельно с этим на другой подложке с помощью фотолитографии и травления формируется структура из нитинола — сплава с эффектом памяти формы. На него методом центрифугирования наносится слой полиимида. На этом этапе на подложке образуется основная структура робота или актуатора, на края которого (в случае краба — на концы ног) дополнительно наносят оксид кремния. Затем полученную структуру переносят на мягкую растянутую подложку между относительно жесткими блоками, а конечности фиксируют с помощью оксида кремния на них. После того как подложку расслабляют, она сжимается и вынуждает робота принять запланированную форму: закрепленные на подложке ноги поднимают тело, а блоки сближаются и загибают клешни. Чтобы структура сохранила такую форму после отделения от подложки ее дополнительно покрывают слоем оксида кремния.
 Этапы создания робота / Mengdi Han et al. / Science Robotics, 2022
Этапы создания робота / Mengdi Han et al. / Science Robotics, 2022
Робот приводится в движение лазерным излучением. Оно нагревает нитинол и вынуждает его возвращаться в плоскую форму, но из-за сдерживающего слоя оксида кремния вместо полного выпрямления происходит лишь небольшой изгиб и робот немного опускается. Если излучение перестает нагревать нитинол, из-за оксидного слоя он возвращается в прежнюю форму и робот поднимается.
 Принцип движения робота / Mengdi Han et al. / Science Robotics, 2022
Принцип движения робота / Mengdi Han et al. / Science Robotics, 2022
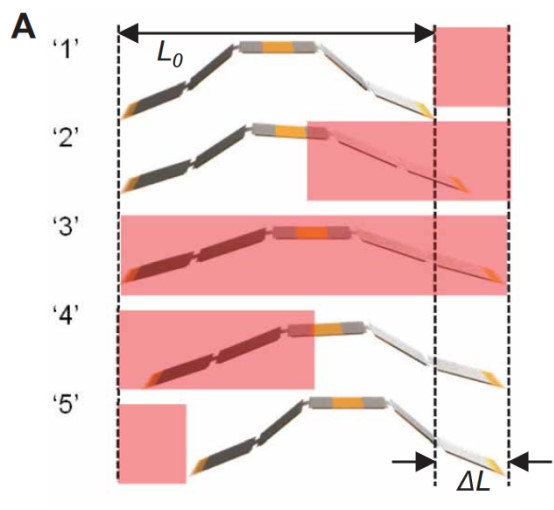
Само по себе это не дает роботу двигаться: он просто опускается и поднимается на месте. Чтобы превратить этот механизм в источник движения, ученые решили использовать сканирующее лазерное излучение, при котором пучок освещает не всего робота сразу, а смещается и проходит через него. Из-за этого при каждом проходе пучка сначала нагревается одна сторона, а потом другая, поэтому в движении появляется асимметрия и робот начинает двигаться в нужную сторону.
 Сканирующий луч лазера, приводящий к асимметричному движению робота / Mengdi Han et al. / Science Robotics, 2022
Сканирующий луч лазера, приводящий к асимметричному движению робота / Mengdi Han et al. / Science Robotics, 2022
Помимо микрокрабов ученые создали несколько других конструкций и показали, как они могут двигаться по подложке в нужном направлении. Кроме того, они провели испытания, в которых 100000 раз повторяли цикл нагревания и охлаждения лазером, и показали, что создаваемые этим методом структуры устойчивы к такой долгой нагрузке и не теряют своих свойств.
Ученые показали, что роботов можно оснащать небольшими уголковыми отражателями, позволяющими отслеживать положение каждого из них из-за гораздо большей доли отраженного света. Также они показали, что на робота можно нанести вещество, меняющее свои отражательные свойства при изменении влажности, pH или уровня ультрафиолетового излучения.
- Источник(и):
- Войдите на сайт для отправки комментариев
