Где верх, где низ: оценка положения в воздухе без акселерометра
Блог компании ua-hosting.company. Как бы это смешно и очевидно не звучало, но для правильного полета необходимо знать, где находится верх, а где низ. Коммерческие дроны используют для этого акселерометр. Но у насекомых, чьи летные навыки заложены генетически и эволюционно, такой «примочки» нет. Возникает вопрос — как они отличают верх от низа? Ученые из Национального центра научных исследований (Париж, Франция) решили провести ряд опытов, чтобы раскрыть эту тайну.
Как биологические системы отличают верх от низа, что помогло это понять, и как можно применить полученные знания на практике. Ответы на эти вопросы мы найдем в докладе ученых.
Теоретическая основа
Для любого летающего существа или объекта, будь то насекомое или дрон, сам процесс полета сопряжен с постоянной борьбой против гравитации, т. е. против притяжения. Для этого им крайне важно контролировать свое положение, тем самым определять направление таких сил, как тяга* и подъёмная сила*.
Тяга* — сила, вырабатываемая двигателем и толкающая самолет сквозь воздушное пространство.
Подъёмная сила* — составляющая полной аэродинамической силы, перпендикулярная вектору скорости движения тела в потоке жидкости или газа, возникающая в результате несимметричности обтекания тела потоком.
Летающие роботы могут быть спроектированы так, чтобы иметь пассивно устойчивое положение, а это означает, что им не нужно активно контролировать свое положение, чтобы оставаться в вертикальном положении. К таким роботам относятся те, что имеют неподвижные крылья или хвост с подвижными крыльями.
Проблема в том, что за пассивную устойчивость приходится платить, поскольку она требует минимальной скорости и приводит к снижению маневренности. Действительно, проворные летательные аппараты, такие как летающие насекомые, четырехроторные роботы и бесхвостые роботы с машущими крыльями, по своей природе нестабильны и полагаются на активное управление положением в воздухе. Потому нестабильные летающие роботы и оснащаются акселерометрами, поскольку фильтрация измерений ускорения во времени позволяет получить направление силы тяжести.
На данный момент остается загадкой, как летающие насекомые оценивают свое положение в воздухе, если вообще оценивают. Хотя у насекомых много различных сенсорных модальностей, датчик притяжения, такой как акселерометр, не обнаружен. Сенсорные сигналы, которые несут информацию о направлении силы тяжести при ходьбе (например, нагрузки на ноги), недействительны в воздухе. Летящее тело часто подвергается ускорению, которое больше силы тяжести, в других направлениях, особенно во время маневрирования. Более того, органы с гироскопической функцией, такие как жужжальца у двукрылых, могут способствовать стабилизации, предоставляя информацию о скорости вращения тела, но они не несут информации об абсолютном угле положения как таковом.
В зависимости от вида насекомых скорость вращения может также определяться с помощью жгутиков антенн, деформаций крыльев, оцеллий (глаз) или путем разделения вращательных и поступательных компонентов оптического потока*. В принципе, можно интегрировать скорость вращения, начиная с известного начального положения, но тогда расчетное положение со временем будет дрейфовать.
Оптический поток* — это отображение видимого движения объектов, поверхностей или краев сцены, получаемое в результате перемещения наблюдателя относительно сцены.
Авторы рассматриваемого нами сегодня труда предложили новый метод получения угла положения тела в воздухе за счет объединения оптического потока с моделью движения.
Модели движения обычно используются для оценки состояния летающих роботов, но почти всегда включают измерения от инерциального измерительного устройства, содержащего гироскопы, магнитометры и акселерометры, для определения положения. Уже были попытки оценить углы положения исключительно за счет оптических потоков и моделей движения, но их результаты были неубедительны.
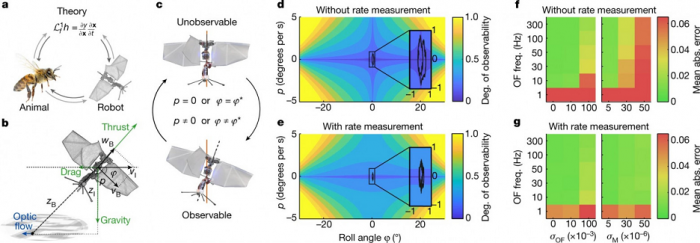 Изображение №1
Изображение №1
Ученые решили следовать методологии, используемой в био-робототехнике (1a), для изучения оценки и управления положением на основе оптического потока. Ученым удалось теоретически доказать, что углы положения могут быть оценены при объединении измерений оптического потока с общей моделью движения неустойчивых летательных аппаратов с вектором тяги. Этот тип модели связывает положение тела, то есть углы тангажа* и крена*, с направлением ускорения.
- Источник(и):
- Войдите на сайт для отправки комментариев
