Магнитометры позволили создать компактный датчик контакта для роботов
Американские инженеры разработали недорогой и компактный датчик прикосновений для роботизированных манипуляторов. Он состоит из эластомера с магнитными частицами и магнитометров, позволяющий реконструировать деформацию эластомера при контакте с предметами и тем самым определять его силу и место.
Статья будет представлена на конференции Conference on Robot Learning 2021, а код библиотеки для использования датчиков опубликован на GitHub.
Захват предметов — одна из важнейших задач в области робототехники, которую решает огромное количество исследовательских групп и компаний. К примеру, Amazon несколько лет проводила соревнования среди команд инженеров, посвященные конкретно этой задаче. Наибольшее внимание в этом направлении сосредоточено на алгоритмах компьютерного зрения, позволяющих роботу распознавать тип предмета, реконструировать его форму и даже предсказывать жесткость, чтобы хорошо схватить его.
Сами захваты тоже постепенно улучшают, но этому аспекту уделяется меньше внимания, хотя в нем тоже есть важные нерешенные задачи, в том числе надежный захват хрупких предметов. Инженеры предлагают разные конструкции для аккуратных и точных захватов, зачастую они сами выполнены из мягких материала, аналога человеческой кожи, по деформации которого робот понимает силу сжатия и даже форму предмета.
К примеру, в прошлом году Toyota показала прототип захвата с надувными камерами и точками на их внутренней поверхности, позволяющими реконструировать изгиб поверхности. Но он, как и многие аналоги, был довольно массивным.
Инженеры из Университета Карнеги — Меллона и лаборатории Meta AI (ранее известная как Facebook AI) под руководством Абхинава Гупта (Abhinav Gupta) создали новый компактный датчик с насадкой из мягкого материала, позволяющей отслеживать параметры прикосновения с высокой точностью.
Датчик состоит из двух частей. Сверху, то есть со стороны прикосновения, располагается эластомер толщиной 2–3 миллиметра и шириной с однорублевую монету — 20 на 20 миллиметров. В эластомере есть ферромагнитные частицы. на этапе создания жидкий прекурсор заливают в форму и устанавливают над и под ним по 16 магнитов. Благодаря этому после затвердевания у эластомера появляется заданная намагниченность. Под эластомером расположена микросхема с пятью магнитометрами.
Принцип действия датчика заключается в том, что при контакте с каким-либо предметом эластромер деформируется и магнитометры регистрируют изменение магнитного потока. Разработчики научили датчик конвертировать изменение магнитного потока в координаты, направление и величину приложенной силы, обучив многослойный перцептрон.
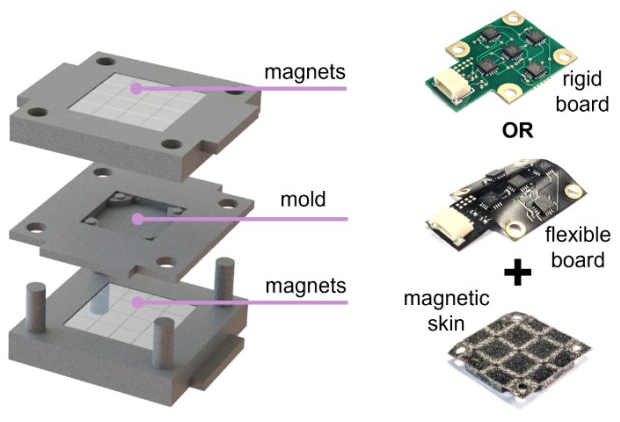 Создание датчика / Raunaq Bhirangi et al. / CoRL 2021
Создание датчика / Raunaq Bhirangi et al. / CoRL 2021
Тесты на точность показали, что среднеквадратичная ошибка для местоположения контакта составила 0,514±0,601 квадратного миллиметра и для силы 0,142±0,025 квадратного ньютона. Инженеры продемонстрировали реальное применение разработки, установив два датчика на роботизированный захват и подняв с его помощью голубику и виноград, не расплющив их.
- Источник(и):
- Войдите на сайт для отправки комментариев
