Распределение обязанностей помогло роботам точно передвинуть груз
Швейцарские и японские инженеры разработали миниатюрного робота, способного ползти по ровной и даже наклонной поверхности, а также прыгать, перенося на себе небольшой груз. Несколько таких роботов могут работать единой группой, распределяя обязанности между собой.
Авторы показали это на примере операции, во время которой два робота толкали тяжелый блок, один измерял пройденное расстояние, а еще двое отвечали за передачу данных от измеряющего робота к толкающим через инфракрасные передатчики. Статья с описанием разработки опубликована в Nature.
Большая часть роботов имеет размер, хотя бы отдаленно сравнимый с человеком, и предназначены для работы в тех же условиях. Но в робототехнике также есть отдельная область, в рамках которой инженеры и ученые создают небольших роботов для работы в недоступных для человека местах. Например, инженеры из Гарвардского университета и Rolls-Royce предлагают использовать для диагностики и ремонта авиадвигателей микророботов, способных проникать во внутренние части конструкции.
Поскольку из-за размера возможности таких роботов сильно ограничены, инженеры предлагают объединять их в группы, способные вместе выполнять более сложные задачи, чем поодиночке. Инженеры под руководством Джейми Пайк (Jamie Paik) из Федеральной политехнической школы Лозанны реализовали эту концепцию на практике, создав миниатюрных автономных роботов, способных распределять части общей задачи между собой.
Робот представляет собой треугольную конструкцию, состоящую из трех расходящихся от общего центра полимерных полосок. Помимо жесткой связи в центре полоски также связаны между собой с помощью пружин по краям. Они состоят из сплава с памятью формы и благодаря этому сокращаются при нагревании электрическим током. Это позволяет роботу прыгать, причем не только вверх. Робот может управлять траекторией движения, активируя нужные пружины в определенной последовательности. Кроме того, на краях двух полосок установлено еще по одному актуатору из сплава с памятью формы. Они позволяют роботу ползти.
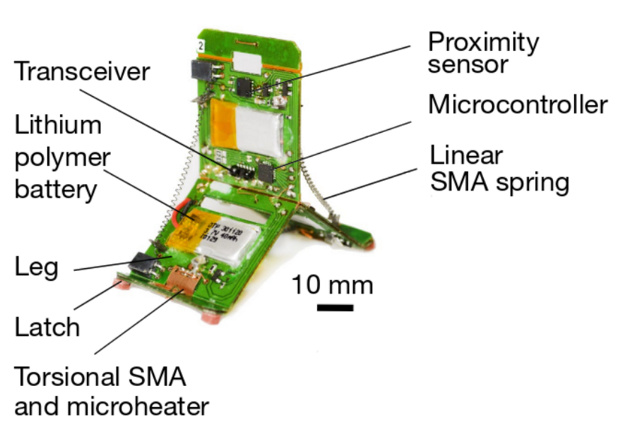 Компоненты робота / Zhenishbek Zhakypov et al. / Nature, 2019
Компоненты робота / Zhenishbek Zhakypov et al. / Nature, 2019
Помимо актуаторов в роботе установлен аккумулятор, микроконтроллер, датчик приближения и инфракрасный приемопередатчик. Последний компонент нужен роботу для взаимодействия с другими роботами. Авторы показали несколько примеров того, как роботы могут работать вместе. В одном из них перед роботами поставили задачу передвинуть на определенное расстояние блок, масса которого велика, чтобы его мог сдвинуть один робот, но не настолько, чтобы с этим не справились два робота. В операции участвовало пять роботов. Два из них толкали блок, принимая сигнал от третьего робота. Он в свою очередь вместе с еще одним роботом служил передатчиком сигналов от пятого робота, измеряющего с помощью датчика приближения расстояние, на которое сдвинулся блок.
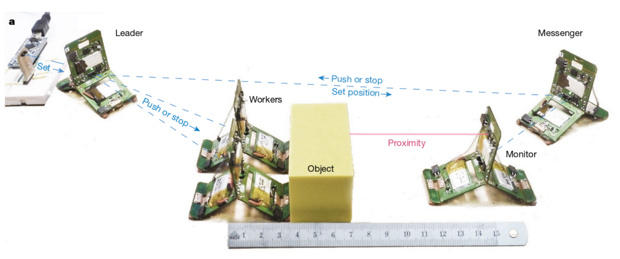 Кооперация роботов для точного перемещения блока / Zhenishbek Zhakypov et al. / Nature, 2019
Кооперация роботов для точного перемещения блока / Zhenishbek Zhakypov et al. / Nature, 2019
Кроме того, инженеры показали, как роботы могут вдвоем преодолевать препятствие. Для этого один робот после прохождения препятствия сообщает информацию о нем второму через инфракрасный передатчик.
- Источник(и):
- Войдите на сайт для отправки комментариев
