Плавучих роботов научили стыковаться в переправу
Американские инженеры разработали систему автоматической стыковки для судов, потенциально позволяющую им объединяться в большие структуры, к примеру, временные переправы. Разработчики провели испытания системы в бассейне на двух роботах и представили результаты на конференции ICRA 2019.
Проект Roboat был представлен в 2016 году инженерами из Массачусетского технологического института и Института передовых городских решений Амстердама. Цель проекта заключается в создании небольших автономных судов, которые могли бы самостоятельно очищать дно каналов Амстердама от мусора. Кроме того, инженеры предлагают использовать таких роботов для создания временных переправ через каналы.
Для второй задачи роботы должны уметь не только самостоятельно перемещаться по каналу, но и автономно стыковаться, формируя единую большую конструкцию. Даниела Рус (Daniela Rus) и ее коллеги из Массачусетского технологического института создали стыковочный узел и алгоритм для роботов, позволяющий им автономно стыковаться даже в условиях качки.
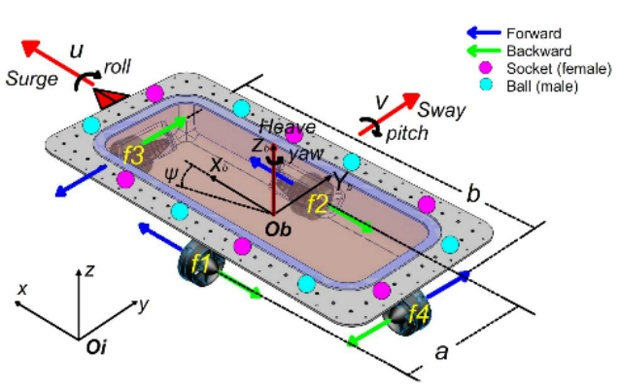
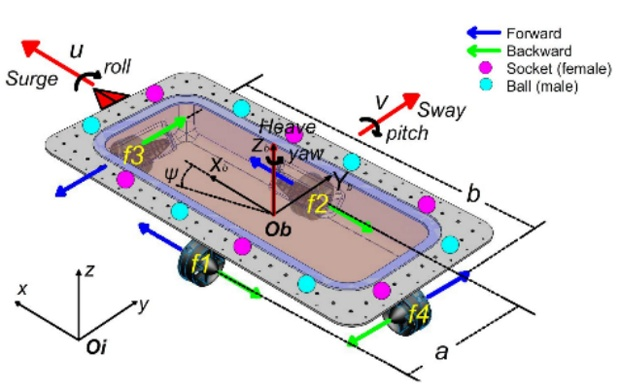
Робот Roboat представляет собой небольшое прямоугольное судно размером 100 на 50 сантиметров с четырьмя винтами. Они расположены посередине каждой стороны корпуса, причем образуют две пары, у каждой из которых винты расположены в одной плоскости. Благодаря этому робот может быстро управлять своим движением вперед или назад, а также поворачивать. Для взаимной ориентации каждый робот оснащен камерой глубины, лидаром, а также QR-кодом, закрепленном на корпусе вертикально.
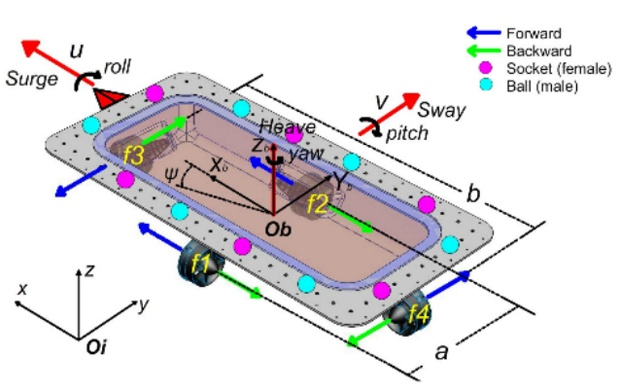 Компоненты робота и оси перемещения / Luis Mateos et al. / ICRA 2019
Компоненты робота и оси перемещения / Luis Mateos et al. / ICRA 2019
Наконец, роботы оснащены активно-пассивными стыковочными агрегатами, состоящими из двух частей. Одна часть представляет собой конус со сферическим наконечником, а вторая — воронка с лазерной системой обнаружения наконечника и электромеханическим фиксатором. Это относительно простая конструкция, позволяющая при этом менять угол между роботами в любом направлении. К примеру, при наличии волн или разной осадке роботы могут расположиться не параллельно, а под небольшим углом.
 Структура стыковочного агрегата Luis Mateos et al. / ICRA 2019
Структура стыковочного агрегата Luis Mateos et al. / ICRA 2019
Воронка в стыковочном агрегате позволила упростить модель, описывающую поведение роботов с трехмерной до двумерной, потому что даже при сильном рассогласовании высоты роботов наконечник конуса с большой вероятностью попадет в воронку. Алгоритм, использованный инженерами для стыковки, достаточно прост и состоит из двух основных этапов.
 Эксперимент по стыковке двух роботов Luis Mateos et al. / ICRA 2019
Эксперимент по стыковке двух роботов Luis Mateos et al. / ICRA 2019
Сначала активный робот минимизирует угол рассогласования между ним и пассивным роботом, а также сдвиг между ними. Во время этого этапа роботы не сближаются на расстояние менее метра и минимизируют рассогласование. После того, как оно стало меньше, чем границы воронки, активный робот начинает движение вперед до стыковки. Пока инженеры провели испытания лишь на паре роботов, но в будущем планируют использовать их для создания крупной переправы из нескольких аппаратов.
Концепция коллективного поведения и объединения в большие конструкции также используется и в роботах, работающих в других средах. К примеру, существуют дроны, способные объединяться в одну большую конструкцию, а также модульные роботы, помимо объединения умеющие пользоваться подручными средствами.
- Источник(и):
- Войдите на сайт для отправки комментариев
