Инженеры создали мягкий клапан для полностью мягких пневматических роботов
Инженеры разработали конструкцию мягкого клапана для переключения между источниками газов, который можно использовать для создания полностью мягких роботов, устойчивых к деформации и изменению формы. На его основе они создали мягкий пневматический захват с механическим сенсором прикосновения, а также робочервя, который может периодически сокращаться и ползти вперед, используя для этого только один источник постоянного давления, сообщается в журнале Science Robotics.
Мягкие роботы имеют несколько важных преимуществ перед жесткими. Например, их можно безопасно применять в медицине или других сферах, где роботу нужно непосредственно взаимодействовать с человеком. Помимо этого, такие роботы могут менять свою форму в зависимости от условий и подвергаться сильным деформациям, оставаясь при этом работоспособными. Нередко такие роботы приводятся в движение с помощью пневматической системы, и инженерам не всегда удается сделать конструкцию полностью мягкой и обойтись без использования жестких элементов, особенно в клапанах для управления пневматикой.
 Philipp Rothemund et al. / Science Robotics, 2018
Philipp Rothemund et al. / Science Robotics, 2018
Группа инженеров под руководством Джорджа Вайтсайдса (George Whitesides) из Гарвардского университета создала для таких роботов новую конструкцию клапана, которую можно сделать полностью из мягких эластомеров. Главный элемент клапана — полимерная мембрана, заключенная в цилиндр с меньшим диаметром, за счет чего она постоянно выгнута. Особенность этой мембраны заключается в том, что она может находиться только в одном из двух стабильных выгнутых положений, между которыми она быстро переключается при приложении внешнего давления. У этого переключения есть гистерезис: для перехода мембраны из одного положения в другое нужно повысить разницу давлений с двух сторон мембраны до значения ΔP1, но при опускании давления она вернется обратно не сразу, а при достижении другого критического давления ΔP2.
 Схема клапана. Philipp Rothemund et al. / Science Robotics, 2018
Схема клапана. Philipp Rothemund et al. / Science Robotics, 2018
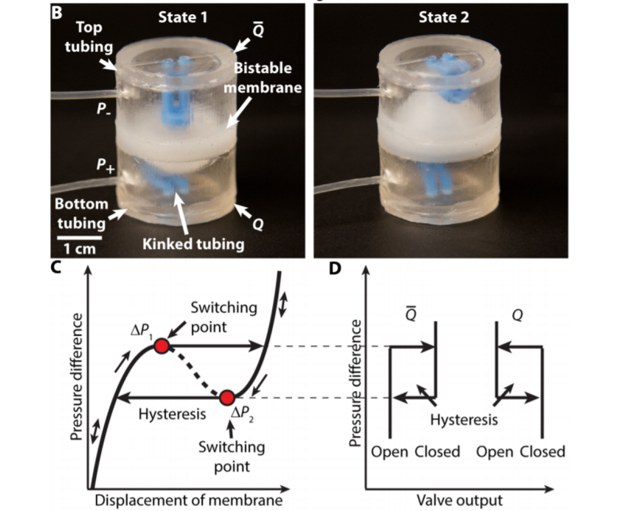 Движение мембраны в зависимости от давления. Philipp Rothemund et al. / Science Robotics, 2018
Движение мембраны в зависимости от давления. Philipp Rothemund et al. / Science Robotics, 2018
Разработчики использовали эти свойства и создали конструкцию клапана для переключения между двумя источниками газа. В полимерном цилиндре находится мембрана, разделяющая его на две камеры, через каждую из которых проходят две трубки для пропускания газа. Помимо этого в каждой камере есть отверстие для подачи газа под давлением, которое переключает мембрану между двумя состояниями. Трубки для пропускания газа расположены таким образом, что в каждом из двух положений мембраны она давит на ту или иную трубку и тем самым не дает газу проходить через нее.
На основе этой конструкции инженеры создали два прототипа. Один из них представляет собой захват, который срабатывает при контакте с интересующим предметом. Он состоит из четырех многосекционных «рук»; секции расширяются при надувании и заставляют всю конструкцию изгибаться. Эти «руки» присоединены к постоянному источнику давления через трубку, которая изначально перекрыта мембраной. В центре захвата находится сенсор контакта, через который выходит воздух, подаваемый в нижнюю камеру клапана. При контакте с каким-нибудь предметом этот выход перекрывается и давление в камере повышается. Из-за этого мембрана переходит в другое состояние, перестает перекрывать доступ воздуха к захвату и тот надувается, хватая предмет.
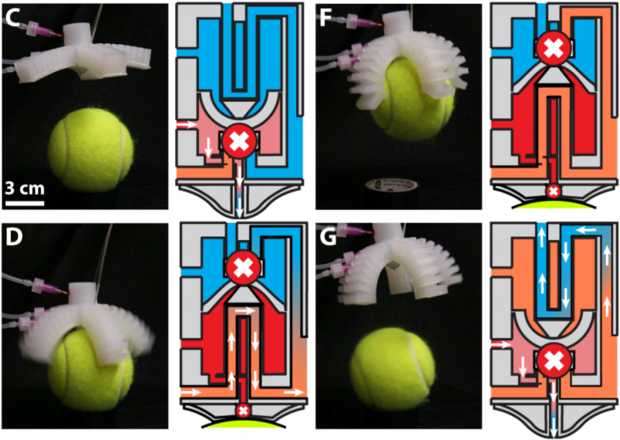 Принцип работы пневматического захвата. Philipp Rothemund et al. / Science Robotics, 2018
Принцип работы пневматического захвата. Philipp Rothemund et al. / Science Robotics, 2018
Также инженеры создали робочервя, который может ползти, периодически сокращаясь и расширяясь, используя для этого только один источник постоянного давления. Этот источник соединен через клапан с воздушной камерой робота и надувает ее, из-за чего робот расширяется и двигает свою переднюю часть вперед. Через некоторое время давление в камере заставляет мембрану переключаться, из-за чего трубка от источника воздуха перекрывается, а трубка для выхода воздуха из камеры наоборот открывается и робот сдувается, подтягивая свою заднюю часть.
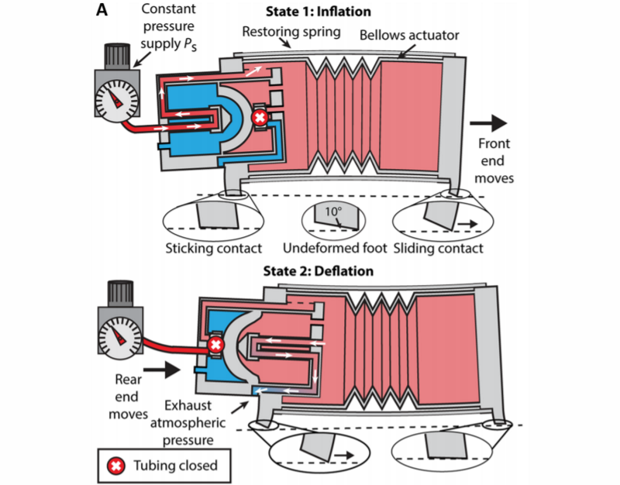 Принцип работы пневматического робочервя. Philipp Rothemund et al. / Science Robotics, 2018
Принцип работы пневматического робочервя. Philipp Rothemund et al. / Science Robotics, 2018
В 2016 году смежная группа исследователей из Гарварда создала небольшого робота-осьминога, в конструкции которого не использовалось ни одного жесткого материала. У него есть мягкие пневматические актуаторы, которые приводятся в действие за счет разложения запаса перекиси водорода на кислород и водяной пар.
Автор: Григорий Копиев
- Источник(и):
- Войдите на сайт для отправки комментариев
