Робота научили убираться, раскладывая вещи так, как нужно пользователю
Исследователи из Принстонского и Стэнфордского университетов разработали систему персонализированной помощи для управления домашними роботами. Она использует языковые модели, чтобы на основе нескольких примеров познакомить устройство с пожеланиями и предпочтениями конкретного пользователя.
Подход, предложенный исследователями, использует возможности обобщения больших языковых моделей — нейронных сетей со множеством параметров, таких как ChatGPT. Эти модели могут обобщать информацию или предоставлять общие рекомендации после обучения на относительно небольших наборах данных или примерах сценариев.
Инженеры использовали такую модель для создания «резюме» предпочтений пользователя, которые основаны на нескольких входных данных. Например, пользователь может задать такое условие: «Одежда красного цвета кладется в ящик, а белая — в шкаф». На основе текстовых данных модель сформулирует обобщенные предпочтения, которые будут управлять роботом.
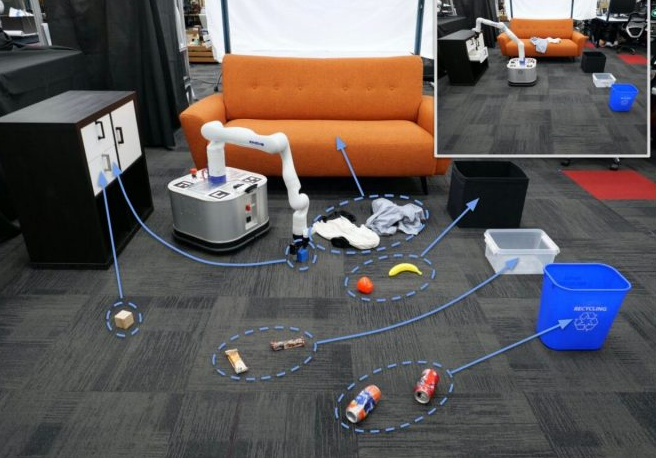 Иллюстрация предпочтений пользователя, определенных языковой моделью. Изображение: Jimmy Wu et al., Princeton University
Иллюстрация предпочтений пользователя, определенных языковой моделью. Изображение: Jimmy Wu et al., Princeton University
Один человек предпочитает хранить рубашки в ящике стола, а другой — чтобы они лежали на полке, объясняют авторы исследования. Они стремятся создать системы, которые будут узнавать о таких предпочтениях всего на нескольких примерах посредством взаимодействий с конкретным человеком.
Чтобы оценить эффективность такой системы, инженеры провели серию тестов, оценивая как общие предпочтения, которые ИИ определял на основе текстовых данных, так и то, как это изменяло поведение настоящего робота-уборщика. Для тестирования они разработали робота TidyBot, который моет пол, а также собирает случайные предметы и размещает их в определенных местах.
Анализ показал быструю адаптацию и точность при понимании команд. Обученный на основе простых правил робот правильно убирал около 85% предметов в реальных тестовых сценариях. Исследователи продолжат работу над моделью для еще большего повышения точности управления.
- Источник(и):
- Войдите на сайт для отправки комментариев
