Роборука определяет предметы после одного прикосновения
Инженеры создали роботизированный захват с тремя пальцами с высокой чувствительностью по всей длине поверхности. О разработке сообщает MIT News. Исследователи из Массачусетского технологического института разработали роботизированную руку с высокой чувствительностью. Сенсорные поверхности пальцев позволяют определить предмет, захватив его только один раз.
В основе разработки — роботизированный палец с жестким скелетом, заключенным в мягкий внешний слой. Внутри пальца исследователи разместили несколько датчиков высокого разрешения GelSight, встроенных под прозрачную силиконовую «кожу» и обеспечивающих перекрестные изображения. Они используют камеру и три светодиода для сбора визуальной информации о форме объекта, обеспечивая непрерывное считывание по всей длине пальца.
Когда палец захватывает объект, камера фиксирует изображение, поскольку цветные светодиоды подсвечивают кожу изнутри. Используя освещенные контуры, которые появляются на мягкой коже, алгоритм выполняет обратные вычисления, чтобы нанести на карту контуры на поверхности захваченного объекта. Исследователи обучили модель машинного обучения идентифицировать объекты, используя необработанные данные изображения с камеры.
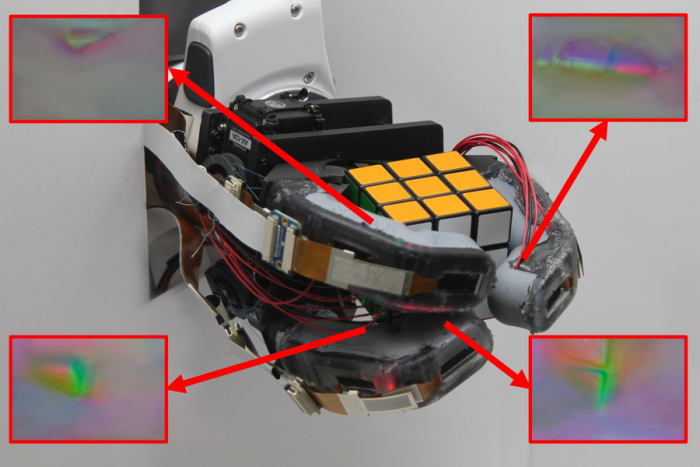 На каждом пальце установлено по две камеры с перекрестным обзором и шесть светодиодов. Изображение: MIT News
На каждом пальце установлено по две камеры с перекрестным обзором и шесть светодиодов. Изображение: MIT News
Большинство альтернативных роботизированных захватов используют мощные датчики, установленные на кончиках пальцев, отмечают исследователи. Поэтому объект должен полностью соприкасаться с ними, чтобы его можно было идентифицировать. В других конструкциях используются датчики с более низким разрешением, распределенные по всему пальцу, но они не фиксируют столько деталей. И тот, и другой варианты требуют нескольких захватов для анализа предмета.
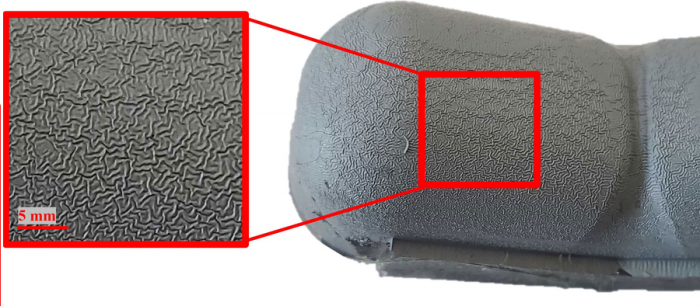 Крошечные «морщины» на поверхности силикона помогают пальцу скользить по поверхности предмета для лучшей идентификации. Изображение: MIT News
Крошечные «морщины» на поверхности силикона помогают пальцу скользить по поверхности предмета для лучшей идентификации. Изображение: MIT News
Исследование показало, что новому устройству достаточно одного захвата, чтобы идентифицировать различные предметы с точностью до 85%. При этом жесткий скелет делает пальцы достаточно сильными, чтобы поднимать тяжелые предметы, такие как дрель. А мягкая кожа позволяет надежно сжимать, но не раздавить податливые предметы, например, пустую пластиковую бутылку для воды.
Наша цель в этой работе состояла в том, чтобы объединить все то, что делает наши человеческие руки такими хорошими, в роботизированном пальце, способном выполнять задачи, с которыми другие роботизированные пальцы в настоящее время не могут справиться, – Сандра Лю, соавтор исследования, аспирант MIT.
- Источник(и):
- Войдите на сайт для отправки комментариев
