Походка гусеницы и липкость геккона: новый мягкий робот-альпинист
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Блог компании ua-hosting.company. Нам всегда есть чему поучиться у природы. Многие технологии, которые стали обыденностью в нашей жизни, являются тому подтверждением. Если же говорить про робототехнику, то тут фантазия инженеров практически безгранична, и в результате мы видим и роботов-собак, и роботов-рыб, и роботов-птиц. Но визуальным сходством с природными эквивалентами дело не заканчивается.
Каждый живой организм можно назвать системой, все детали которой выполняют определенные функции, тем самым работая на благо организма. Понимание того, как те или иные функции реализуются, позволяют инженерам их воссоздать, используя рукотворные творения.
Ученые из университета Уотерлу (Канада) решили воссоздать в роботизированном виде гекконов, а точнее их способность перемещаться по стенам и потолкам. Какова структура робота, насколько он хорошо имитирует гекконов, и может ли он удержаться на потолке вниз головой? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Многие существа, населяющие Землю, обладают способностью лазать по практически любой поверхности, хоть по стенам, хоть по потолку. Как правило, такое умение обусловлено микроструктурой поверхности их биологической ткани. Касательно именно гекконов, то их неоднократно исследовали, дабы в точности описать механизмы, позволяющие им цепляться за поверхность. Мы даже знакомились с одним из таких трудов в статье Липкие гекконы: адгезионный липидный слой.
Имитация сложной структуры тканей и подвижного поведения живых существ, способных лазать, дало бы возможность разработать биомиметических мягких роботов, которые могли бы добраться туда, куда «жестким» роботам дороги нет.
 Изображение №1
Изображение №1
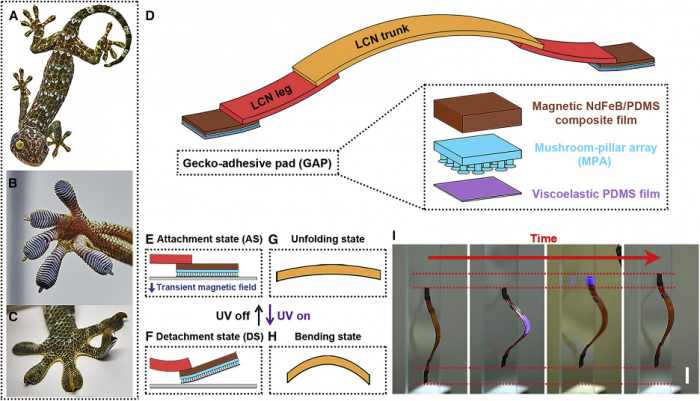
Геккон обладает исключительными способностями к лазанию, связанными с динамическим поведением прикрепления/отсоединения его пальцев, которые оснащены уникальной иерархической планарной микроструктурой (фолликулярные клетки и волоски), обеспечивающей значительные силы Ван-дер-Ваальса для гибкого сцепления с различными поверхностями (1A).
Попытки перенести этот механизм на жестких роботов были, но не особо успешны. Конвенциональные роботы лишены той гибкости, которая присуща гекконам, что сильно ограничивает их подвижность. Что касается мягких роботов, то им требуется не только подножка, обладающая динамическим креплением/отсоединением на различных поверхностях, но и деформируемое мягкое тело. Сейчас существует много вполне работоспособных лазающих мягких роботов, способных передвигаться по обычным поверхностям с различными углами наклона, используя различные стратегии.
В частности, такие роботы были созданы за счет интеграции пневматически / электростатически липких ног с мягкими мышечными приводами, но для поддержания стабильной адгезионной способности на различных поверхностях необходимо большое количество энергии.
Благодаря преимуществам программируемой конструкции интеллектуальных материалов, настраиваемой эластичности, анизотропной деформации, легкой миниатюризации и чувствительности к раздражителям (свет, тепло, электрическое/магнитное поле, влажность или pH) жидкокристаллические сети (LCN от liquid crystal network) были использованы для имитации управляемой мягкой мышцы пальца лапки геккона для эффективного прилипания/отлипания (1B и 1C). В дополнение к электрическому полю, для которого нужны провода, использовались также и бесконтактные стимулы (тепло и свет). Однако достичь непрерывной работы (лазанья по отвесным поверхностям) без привязки к внешнему блоку системы питания так и не удалось. Другими словами, существует необходимость в разработки системы, которая может быть дистанционно управляема.
В рассматриваемом нами сегодня труде ученые продемонстрировали мягкого робота, который обладает способностью прикрепления/отсоединения, как у гекконов, и возможностью перемещаться, как гусеница-землемерка (гусеница, у которой есть только 2 пары ног — грудные и брюшные).
- Источник(и):
- Войдите на сайт для отправки комментариев
