Нетривиальная тривиальность: как робота научить искать нужный предмет в куче хлама
Блог компании ua-hosting.company. Каждый день мы совершаем множество действий, о которых особо и не задумываемся. Мы ходим, дышим, смотрим на что-то, что-то слышим и т. д. Но есть и такие действия, которые требуют хоть какого-то когнитивного вовлечения: поиски ключей, сортировка вещей для стирки, уборка и т. д. Все это весьма прозаичные и легковыполнимые задачи. Для человека — да, но вот для робота — это настоящий кошмар.
Положите перед роботом кучу хлама, попросите его найти в ней определенный предмет, и вы увидите, что бояться восстания машин как в «Терминаторе» точно не стоит.
И вот группа ученых из Массачусетского технологического института (США) решили наделить робота умением находить нужный предмет среди множества ненужных. Почему такая задача для робота сложна, как именно ученые помогли роботу с ней справиться, и какое практическое применение может быть у робота-ищейки? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
В чем заключается основная сложность поиска определенного предмета в куче других? В том, что целевой предмет может быть частично или полностью скрыт от нашего взора. В таком случае мы просто начинаем перебирать предметы, откладывая в сторону все лишнее, пока не найдем нужное. Похожая картина может наблюдаться и на очень аккуратном складе, где храниться множество, скажем, коробок с чем-то, а нам нужно найти определенную. Человеку выполнить эту задачу не так уж и сложно, в отличие от роботов.
Методики обучения роботов поиску каких-либо объектов на данный момент можно разделить на две категории. В первой используется зрительное восприятие, когда робот с помощью камер ведет активный поиск в поисках целевого объекта. Если ему что-то мешает, он может убрать или обойти преграду и продолжить поиск. Такая система отлично работает, когда объектов мало, но становится малоэффективной, если «куча хлама» большая или их несколько.
Второй подход основан на использовании радиочастотного (РЧ или RF от radio frequency) восприятия в дополнение к визуальному. В отличие от видимого света и инфракрасного излучения, радиочастотные сигналы могут проходить через многие материалы, такие как картон, дерево и пластик. Опираясь на этом факте, были созданы системы, способные находить скрытые объекты, помеченные специальными метками (RFID от Radio Frequency IDentification). Этот подход хорошо в том случае, если все целевые объекты будут помечены RFID. Если же метка будет лишь на небольшом подмножестве объектов, то система становится не такой эффективной.
В рассматриваемом нами сегодня труде ученые решили задаться вопросом: возможно ли создать роботизированную систему, которая выполняет эффективный механический RF-Visual (радиочастотный+визуальный) поиск как для целевых объектов с RF-меткой, так и без нее? Вместо требования того, чтобы все элементы были RF-помечены, рассматривались более реалистичные и практичные сценарии, в которых маркируется только подмножество элементов.
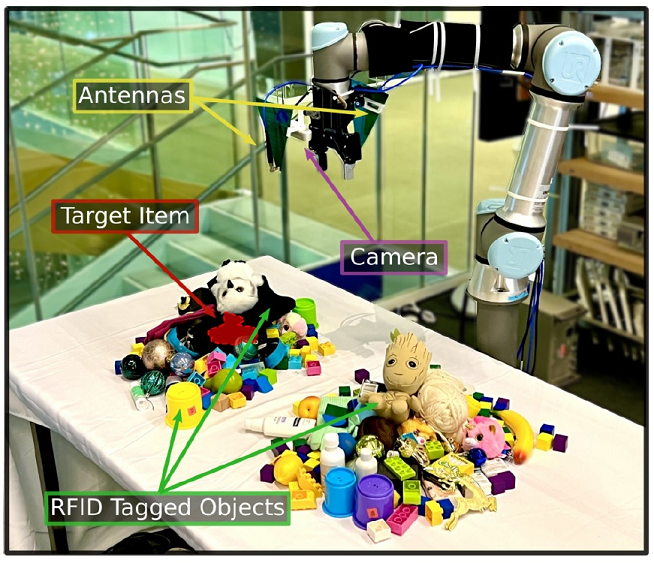 Изображение №1: роботизированная система FuseBot.
Изображение №1: роботизированная система FuseBot.
В результате была создана роботизированная система под названием «FuseBot», которая может эффективно находить и извлекать помеченные и не помеченные предметы в условиях прямой видимости, вне прямой видимости и в условиях полной окклюзии (визуально невидимый).
- Источник(и):
- Войдите на сайт для отправки комментариев
