Носимую гидравлическую роборуку научили бить и разрушать
Канадские инженеры создали носимую роборуку с мощной гидравлической системой, позволяющей руке быстро двигаться в разных направлениях. Она управляется другим человеком с контроллером в виде уменьшенной модели устройства и требует для своей работы гидравлический агрегат, подающий жидкость под давлением. В качестве примеров разработчики показали, как роборука может подать нужные инструменты или проломать стену из гипсокартона.
Статья была представлена на конференции ICRA 2020.
Достаточно давно в области создания электромеханических рук, в которой обычно инженеры создавали протезы, образовалось отдельное направление по созданию дополнительных рук. Пока эти разработки не применяются на практике, но инженеры задумываются над тем, где их можно было бы применить. В основном они предлагают использовать носимые роборуки для того, чтобы подавать инструменты и держать конструкции, пока человек выполняет основную часть работы, требующую ума, точных навыков и прочего. Текущие проекты носимых роборук почти всегда используют электромоторы и часто имеют не очень высокие силовые характеристики.
Инженеры из канадского Междисциплинарного института технологических инноваций и компании Exonetik под руководством Жана-Себастьяна Планта (Jean-Sébastien Plante) создали гидравлическую руку, совмещающую в себе высокую силу и скорость работы, а также возможность легко двигать сегменты устройства руками. Гидравлическая система накладывает самое большое ограничение: руке требуется достаточно большой гидравлический агрегат, обеспечивающий давление жидкости в каналах и гидроцилиндрах руки.
Рука крепится на надеваемом жилете, и ее основание находится у поясничной области спины. Она состоит из трех сегментов, соединенных между собой и основанием через три узла. В каждом из них есть по два гидроцилиндра, соединенных тросами с валом, соединяющим два сегмента руки. Каждая пара гидроцилиндров соединена через трубки с гидравлическим агрегатом, в которых тоже есть по два главных цилиндра. Сегменты руки меняют угол между собой за счет того, что управляющие цилиндры в агрегате могут создавать разницу давления на цилиндрах в соединении. Также на конце руки есть захват с тремя пальцами, который также работает за счет отдельных гидроцилиндров.
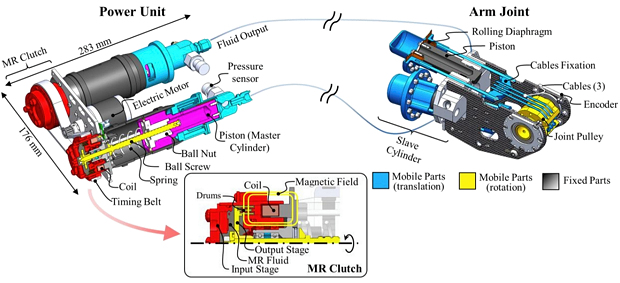 Схема гидравлической системы / Catherine Véronneau et al. / ICRA 2020
Схема гидравлической системы / Catherine Véronneau et al. / ICRA 2020
Одно из преимуществ новой роборуки заключается в том, что из-за отсутствия большого количества электромоторов и механических передач в одном из режимов ее можно легко двигать рукой с небольшим сопротивлением. Кроме того, ее сегменты развивают высокий крутящий момент, до 35 ньютон-метров, и скорость до 3,4 метра в секунду. Грузоподъемность роборуки составляет пять килограммов. Также она способна начинать движение и менять его направление практически без задержки, благодаря магнитореологическим муфтам в гидравлическом агрегате.
Разработчики показали несколько примеров использования роборуки. В одном из них оператор помогал носителю руки собирать макеты фруктов. В другом роборука подавала инструменты во время работы. А в третьем примере она просто била по гипсокартону и в итоге пробила его в нескольких местах.
- Источник(и):
- Войдите на сайт для отправки комментариев
