Мягкие роборуки снабдили сенсорами нажатия и внутреннего давления
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Американские инженеры разработали мягкий актуатор, оснащенный тремя типами сенсоров, реагирующих на нажатие, искривление и изменение внутреннего давления. Такие актуаторы, напечатанные на 3D-принтере, можно использовать для захвата небольших объектов с различной твердостью и рельефом поверхности, не боясь повредить их, пишут ученые в Advanced Materials.
Одна из проблема роборук и аналогичных автоматических захватывающих устройств состоит в том, что обычно они с трудом подстраиваются под свойства тех объектов, которые им нужно поднимать и удерживать, ведь сила, с которой можно сжимать яйцо, довольно сильно отличается от силы, которую можно прикладывать к металлическому шарику. Чтобы решить проблему, автоматическое устройство должно с помощью системы обратной связи анализировать механический отклик сжимаемого объекта, измеряя силу его реакции и быстро меняя собственное давление. Устройства с подобными свойствами уже создаются, однако все они обладают недостаточной чувствительностью и специфичностью по отношению к различным типам внешнего воздействия.
Инженеры под руководством Дженнифер Льюис (Jennifer Lewis) из Гарвардского университета разработали новую технологию для получения мягких актуаторов, оснащенных искусственной соматосенсорной системой, которая состоит из сенсоров трех различных типов и позволяет устройству контролировать силу нажатия в зависимости от механического отклика. Делать такой актуатор ученые предложили из гибкого эластомера с помощью 3D-печати.
 Ryan L. Truby et al./ Advanced Materials, 2018
Ryan L. Truby et al./ Advanced Materials, 2018
Упругая эластомерная матрица актуатора была собрана из трех силиконовых элементов, в которых с помощью технологии внутренней 3D-печати (embedded 3D printing) можно получить сетку из тонких каналов довольно сложной геометрии. Один из этих каналов выполнял функцию пневматической системы, которая изгибает устройство, а еще в трех — находился неньютоновский гель, обладающий ионной проводимостью. При сдавливании или растяжении таких каналов меняется их геометрия, а следовательно — и их проводимость. Поэтому изменение сопротивления канала можно использовать в качестве сигнала о необходимости сменить конфигурацию — согнуться или разжаться. Каждый из трех каналов выполнял функции одного из сенсоров: контактного датчика, датчика внутреннего давления и датчика искривления.
 Схема получения актуатора с помощью внутренней 3D-печати. Ryan L. Truby et al./ Advanced Materials, 2018
Схема получения актуатора с помощью внутренней 3D-печати. Ryan L. Truby et al./ Advanced Materials, 2018
Сначала авторы работы показали, что такое устройство можно использовать в качестве сенсора влажности. В зависимости от содержания воды силиконовая матрица может сжиматься или расширяться, что можно зафиксировать с помощью ионопроводящих сенсоров.
Значительно более интересны приложения актуатора, основанные на его реакции на внешнее механические воздействия. Измерив отклик устройства на несколько различных типов внешнего воздействия: изгиб в различных направлениях, короткий удар и изменение внутреннего давления в канале пневматической системы — ученые разработали схему, по которой такую систему из трех сенсоров можно использовать в качестве соматосенсорной системы, реагирующей на изменение как внешнего, так и внутреннего давления, и изменяющая в зависимости от этого свою конфигурацию.
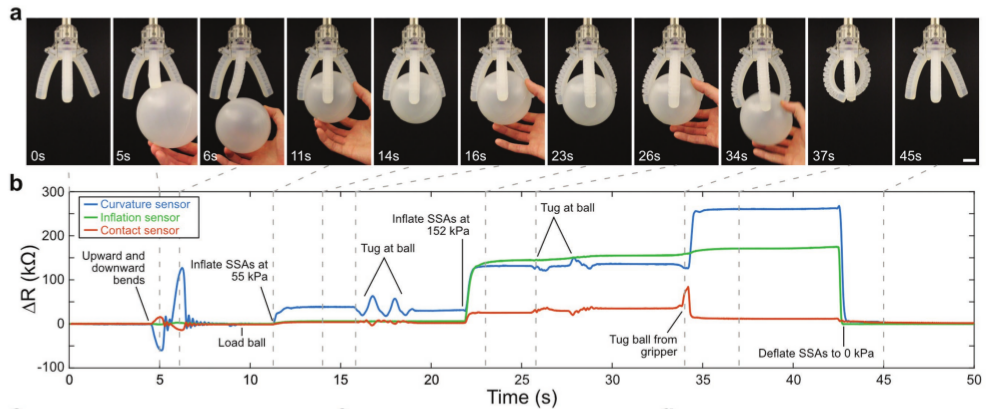 Изменение сопротивления трех типов сенсоров в зависимости от состояния роборуки при захвате шарика. Ryan L. Truby et al./ Advanced Materials, 2018
Изменение сопротивления трех типов сенсоров в зависимости от состояния роборуки при захвате шарика. Ryan L. Truby et al./ Advanced Materials, 2018
Затем из трех актуаторов ученые собрали роборуку — захватывающее устройство, способное сжимать и удерживать различные объекты. Степень искривления и сила сжатия каждого из трех «пальцев» этой руки регулируется автоматически в зависимости от механических свойств объекта и свойств его поверхности. Роборуку инженеры проверили при температурах от −10 до 95 градусов Цельсия — и для нескольких мячиков разной массы, размера и с разным рельефом на их поверхности. С каждой из предложенных задач роборука успешно справилась, варьируя сопротивление на сенсорах и, соответственно, силу сжатия.
Harvard SEAS
Авторы работы отмечают, что разработанная ими технология позволяет получать чувствительные актуаторы, которые способны работать в течение долгого времени без заметной задержки при обработке сигналов, участвующих в системе обратной связи. Разработчики надеются, что такие или подобные им чувствительные устройства станут важными элементами роботов, которые будут использоваться в качестве ассистентов во время хирургических операций или для аккуратных манипуляций с хрупкими или деликатными объектами.
В прошлом году для создания мягкой роборуки ученые предложили использовать манипулятор, также напечатанный на 3D-принтере, и управляемый с помощью системы надуваемых газом ячеек. До этого другая группа ученых разработала полностью мягкого робота-осьминога, который вообще не содержит твердых элементов и даже в качестве источника питания использует разложение перекиси водорода.
Автор: Александр Дубов
- Источник(и):
- Войдите на сайт для отправки комментариев
