Жидкий металл дал роботам осязание
Исследователи из Вашингтонского университета создали «кожу» для роботов, которая позволяет им осязать предметы. В ее основе лежат микрофлюидные каналы, заполненные жидким металлом, которые позволяют измерять натяжение поверхности при соприкосновении. Статья опубликована в журнале Sensors and Actuators A: Physical.
Создано множество роботов с манипуляторами для захвата предметов. Некоторые из них даже владеют сложными навыками, например, умеют аккуратно выкладывать камни в устойчивые башни. Но все же, несмотря на применение компьютерного зрения, которое позволяет им понять за какую часть лучше всего хватать тот или иной предмет, почти все они лишены важного чувства, которое помогает людям крепко держать неудобные предметы и не повреждать их — точного осязания.
 UCLA Engineering
UCLA Engineering
Американские инженеры создали для этого специальную пленку, закрепляемую на поверхности роботов, и дающую им возможность измерять силу сдвига при взаимодействии с предметами. Она состоит из эластичного полидиметилсилоксана, в котором проделаны небольшие каналы шириной около пятидесяти микрометров. Они заполнены сплавом под названием EGaIn, в котором три четверти составляет галлий, а оставшуюся четверть — индий. Инженеры выбрали его из-за того, что он находится в жидком состоянии даже при комнатной температуре.
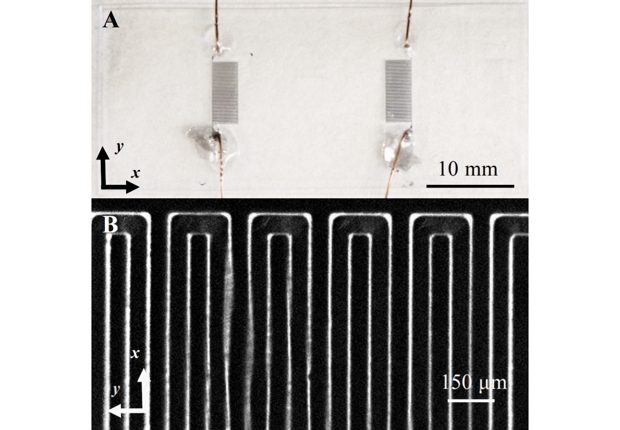 Микроканалы для жидкого металла. Jianzhu Yin et al. / Sensors and Actuators A: Physical, 2017
Микроканалы для жидкого металла. Jianzhu Yin et al. / Sensors and Actuators A: Physical, 2017
Исследователи решили использовать проводимость этого сплава в качестве основы механизма осязания кожи. Поскольку в нее встроено несколько каналов, при прикосновении к предметам каждый из каналов будет растягиваться или сокращаться. К примеру, если робот проведет пальцем по какой-то поверхности, половина поверхности пальца, направленная в сторону движения, будет растягиваться, а другая сжиматься. Поскольку при изменении длины каналов проводимость металла меняется, сопоставив данные об этом изменении от нескольких каналов можно вычислить деформацию.
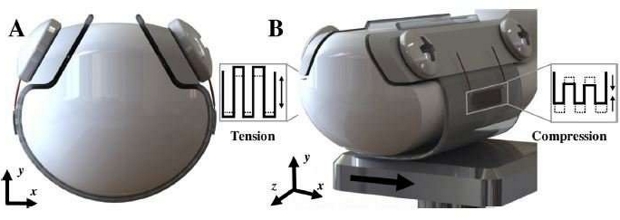 Механизм измерения деформации. Jianzhu Yin et al. / Sensors and Actuators A: Physical, 2017
Механизм измерения деформации. Jianzhu Yin et al. / Sensors and Actuators A: Physical, 2017
Недавно другие американские инженеры разработали рекордно ловкого робота для манипуляции с предметами, который умеет визуально определять области предмета, наиболее подходящие для надежного захвата. Интересно, что разработчики научили его этому на виртуальных, а не реальных предметах. А другого робота научили вертеть предметы в руке и таким образом составлять их объемные модели.
Автор: Григорий Копиев
- Источник(и):
- Войдите на сайт для отправки комментариев
