Роботы помогли разобраться в академической гребле
Исследователи из Лаборатории гидродинамики Политехнической школы (Франция) с помощью роботов изучили эффективность разных техник академической гребли. Исследование опубликовано в Physics Today, кратко суть работы пересказывает IEEE Spectrum.
На сегодняшний день в академической гребле принято грести синхронно — все члены экипажа совершают гребок одновременно. Благодаря этому лодка быстрее ускоряется, однако ее скорость неравномерна и падает в перерыве между гребками. По расчетам авторов нового исследования, при синхронной гребле в перерывах между гребками скорость лодки падает на 20 процентов, а из-за колебаний скорости потери энергии от трения корпуса лодки об воду на пять процентов больше, чем при асинхронной технике.
Теоретически, асинхронная гребля с фиксированной задержкой между погружениями весел может быть более эффективной за счет поддержания постоянной скорости. Эксперименты по внедрению асинхронной техники гребли проводились и ранее, однако до сих пор было неясно, насколько эффективен тот или иной подход.
 Jean-Philippe Bouche et al., / Physics Today
Jean-Philippe Bouche et al., / Physics Today
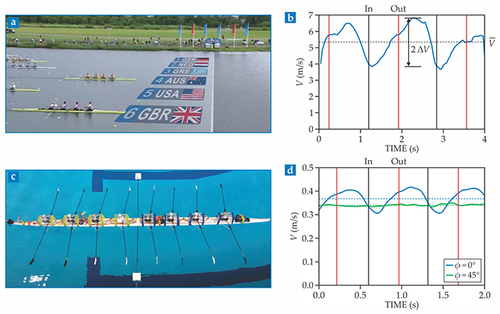 Колебания скорости при синхронной гребле обозначены синим, колебания скорости при асинхронной гребле обозначены зеленым. Jean-Philippe Bouche et al., / Physics Today
Колебания скорости при синхронной гребле обозначены синим, колебания скорости при асинхронной гребле обозначены зеленым. Jean-Philippe Bouche et al., / Physics Today
Для того, чтобы экспериментально проверить возможную эффективность асинхронной гребли и сравнить ее с синхронной, авторы нового исследования сконструировали двухметровую стеклопластиковую модель лодки для восьми гребцов в масштабе 1:10. При масштабировании модели исследователи также учли массу лодки и гребцов, роль которых исполняли роботы под управлением Arduino. При этом роботы так же, как и люди, «гребут спиной», двигаясь вперед и назад.
Испытания модели в бассейне показали, что при синхронной гребле скорость лодки с роботами колеблется на 12 процентов, в то время как при асинхронной гребле колебания скорости не превышают двух процентов — таким образом, асинхронная гребля действительно оказалась более энергоэффективной. Тем не менее, в зачете на скорость синхронная гребля все равно оказалась быстрее. Сами исследователи такие результаты объяснили тем, что не учли изначально дополнительное ускорение, которое не связано непосредственно с водой — одновременно смещающиеся гребцы придают лодке дополнительный импульс, поэтому синхронная гребля позволяет развить бóльшую скорость.
Ранее международная группа инженеров сконструировала водоплавающего робота, способного самостоятельно добывать себе электроэнергию из грязной воды при помощи микробного топливного элемента.
Автор: Николай Воронцов
- Источник(и):
- Войдите на сайт для отправки комментариев
