Миниатюрный "дирижабль-робот" будет исследовать пустоты и помещения, скрытые в недрах исторических памятников и памятников архитектуры
Группа французских исследователей, которая недавно открыла неизвестные ранее пустоты в недрах пирамиды Хеопса, начала разработку двух робототехнических платформ, предназначенных для исследований и составления карт недоступных для людей пустот и помещений в древних зданиях, памятниках и других исторических сооружениях. При этом, использование новых археологических роботов позволит производить исследования с минимально возможным уровнем наносимого ущерба, для этого не придется вскрывать запечатанные двери или пробивать входы через стены.
Данная работа производится специалистами французского исследовательского института Inria и Национального центра научных исследований CNRS (National Center for Scientific Research) при участии специалистов из Каирского университета, Египет, и института HIP.
Основная идея заключается в том, что для проникновения в закрытое помещение придется просверлить только одно маленькое отверстие, диаметром в 3.5 сантиметра. Через это отверстие в помещение запускается робот, который в сложенном состоянии представляет собой длинную трубку, из которой выдвигается камера с высокой разрешающей способностью, установленная на подвижной платформе. Осмотрев при помощи этой камеры внутренности помещения, археологи принимают решение о целесообразности его дальнейших исследований. И в этом случае в помещение через то же самое отверстие запускается второй робот.
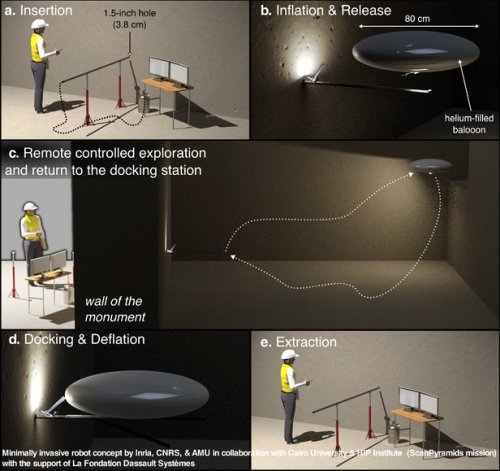
Второй робот оборудован эластичным баллоном, в который закачивается легкий газ, превращая его в небольшой «дирижабль». Передвигаясь по воздуху, робот-дирижабль производит осмотр помещения, делает фотоснимки, снимает видео и составляет карту, не прикасаясь ни к чему и не нанося никакого вреда помещению и находящимся в нем предметам. Передвижение по воздух позволит небольшому роботу преодолеть множество препятствий, таких, как лестницы и завалы, которые стали бы непреодолимыми для роботов, передвигающихся по поверхности.
После выполнения своей миссии робот возвращается к исходной точке, к отверстию, фиксируется и выпускает газ из баллона, после чего его можно извлечь из помещения через отверстие.
«Пока у нас еще нет никаких конкретных планов по использованию таких роботов для исследования памятников архитектуры» – рассказывает Жан-Батисте Мурре (Jean-Baptiste Mourret), руководитель данного проекта, – «Но мы не сомневаемся, что такие возможности нам представятся в самом ближайшем будущем».
- Источник(и):
- Войдите на сайт для отправки комментариев
