Нежное касание: роботизированная рука с функцией прогнозирования ошибок
Блог компании ua-hosting.company. На протяжении тысячелетий наука занимается тем, что пытается объяснить окружающий нас мир и все что в нем есть, от флоры и фауны до процессов и явлений. Порой, достигнув понимания естественной системы, ученые хотят ее воспроизвести. Лучше всего это созидательное рвение проявляется в робототехнике. Иногда роботизированная имитация выглядит довольно правдоподобно и даже способна выполнять тот же набор основных действий, что и оригинал. Однако ей все равно не хватает, если можно так выразиться, элегантности и тонкости функционала.
К примеру, возьмем в руки чашку кофе. Мы способны оценить ее температуру, примерную массу, габариты, текстуру и форму. И все эти оценочные действия происходят одновременно за счет совместной работы нескольких систем, начиная от мышечной и заканчивая нейронной. Достичь подобного спектра функционала для роботизированных рук — крайне сложная задача.
Ученые из Кембриджского университета (Великобритания) разработали новый тип роботизированной руки, которая способна хватать различные предметы и не ронять их. На первый взгляд, подобное «достижение» кажется незначительным, но достигается оно за счет движения кисти робо-руки и информации, получаемой из датчиков ее кожи.
Какова структура роботизированной руки, как она работает и какие действия способна выполнять? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
За последние десятилетия роботы прошли стремительный путь эволюции, одной из основных вех которой можно считать зарождение мягкой робототехники. В аспекте таких действий как захват и манипулирование объектами мягкие роботы значительно лучше справляются с пассивной адаптацией, необходимой ввиду непредсказуемости и непостоянности условий окружающей среды. Другими словами, если жесткого робота необходимо заранее запрограммировать на захват плюшевого мишки и стального куба, то мягкий сможет сделать это сам ввиду пассивной адаптации. Это хоть и утрированный пример, но все же пример.
Несмотря на развитие мягкой робототехники в аспекте ее подвижности, куда важнее сенсорное восприятие, которое позволяет расширить спектр манипуляционных возможностей роботизированных рук.
Тактильное восприятие в мягкой робототехнике обычно страдает от проблем нелинейности, низкой плотности рецепторов и / или отсутствия модульности и мягкости, что препятствует широкому внедрению какого-либо единого решения. Распределенные массивы тактильных датчиков в некоторой степени решают проблему низкой плотности, однако обычно ограничиваются гибкими печатными платами или мягкими датчиками с сильно нелинейными характеристиками. В настоящее время основной задачей в этой области является разработка сенсорных моделей, которые могут предоставлять высокоуровневую сенсорную информацию для управления с обратной связью.
Ученые отмечают, что для выполнения действия «захват» требуются два компонента: алгоритм планирования захвата и реактивный компонент, который адаптируется к неопределенностям в среде. Планирование стратегии надежного захвата ранее основывалось на моделировании. Однако из-за большой изменчивости и неопределенности в параметрах среды/роботов в последнее время предпочтение отдается подходам, основанным на данных. Но даже в этом случае большинство этих стратегий захвата опираются на квазистатические предположения. У человека же захват предмета в значительной степени зависит от пассивных свойств руки. То, как мы берем предмет и удерживаем его зависит от динамического взаимодействия и не требует значительных визуальных данных. Грубо говоря, нам не обязательно пялиться на чашку чая 10 минут, чтобы взять ее в руки и не уронить.
Эти морфологические принципы были применены для разработки мягких роботизированных рук, которые требуют минимального планирования захвата и визуальной обработки для решения различных задач. Недавние исследования показали, что эти мягкие роботизированные конструкции также могут использовать человеческие знания для создания одноэтапных стратегий захвата из-за их антропоморфной природы. С помощью внутренних моделей и контактной информации эти стратегии без обратной связи могут быть преобразованы в последовательные стратегии с обратной связью, что делает контроллер более устойчивым к различным объектам.
Что касается адаптации к захвату, были проведены многообещающие исследования по обнаружению «аномалий» во время манипуляций, по обучению обнаружению ошибок с использованием последовательных нейронных сетей с визуальным вводом и по формированию основ для исправления ошибок. Одной из самых распространенных ошибок захвата у роботизированных рук является выскальзывание объекта. Чтобы адаптироваться к этому и другим типам ошибок необходима плотная тактильная информация и высокая пропускная способность контроля. Для пассивных конструкций, основанных на мягком взаимодействии, например, в случае пассивных протезов, такая высокая сенсорная и контрольная полоса пропускания редко доступны. Не говоря уже о том, что могут быть ошибки еще до момента захвата объекта.
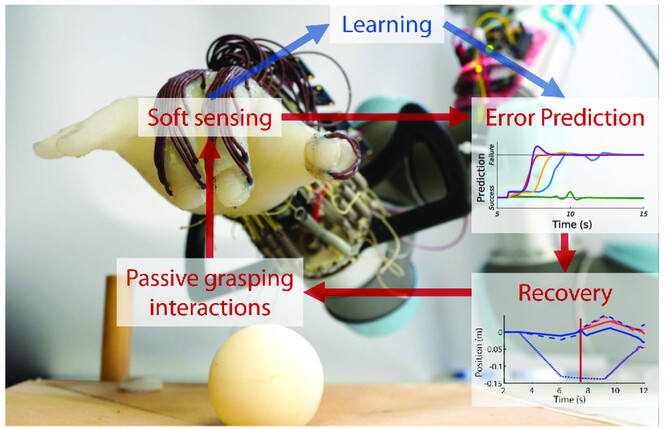 Изображение №1
Изображение №1
В рассматриваемом нами сегодня труде ученые описывают предиктивную оценку качества захвата в мягкой пассивной антропоморфной руке с сенсорными датчиками. Ученые обучили роботизированную руку обнаруживать и устранять ошибки захвата еще до их проявления.
- Источник(и):
- Войдите на сайт для отправки комментариев
