Итальянцы сделали грузовой дрон-конструктор. Двигательные модули крепятся к грузу ремнями, а конфигурация беспилотника для каждого случая рассчитывается автоматически
Инженеры из Италии создали модульный дрон для перевозки грузов, конфигурацию которого можно изменять в зависимости от массы и габаритов посылки, причем расчет необходимой конфигурации происходит автоматически. Беспилотник состоит из одного вычислительного блока и нескольких двигательных, которые крепятся по разным сторонам коробки с помощью ремней. Испытания беспилотника в помещении и на открытом воздухе прошли успешно, но перевозить он может пока что только грузы в квадратных или прямоугольных коробках.
Статья опубликована в IEEE Robotics and Automation Letters, видео с демонстрацией выложено на YouTube.
Наиболее распространенный вид дронов для перевозки грузов — мультикоптеры. Это механически простые летательные аппараты с тремя и более несущими винтами, которые удобны благодаря несложной сборке, маневренности и низкой себестоимости. Однако у них есть значительный недостаток — широта применения одного дрона ограничена его максимальной грузоподъемностью и размером конкретной посылки. На такие беспилотники обычно устанавливают стационарный бокс, который прикреплен к раме и позволяет перевозить груз только определенных формы, размера и массы. Отсутствие гибкости мультироторов требует от компаний большого парка аппаратов.
Одно из возможных решений — использование модульных дронов. Например, ученые описали конструкцию аппарата вертикального взлета и посадки, который может собираться и летать в большом количестве произвольных конфигураций. Еще один пример — модульная воздушную роботизированная платформа UFO для перемещения жестких объектов с двигательных модулей, которые можно крепить к грузу. Однако в обоих решениях решение о количестве блоков и их настройка лежат на плечах пользователя. Более автоматизированной была разработка американских исследователей, которые предложили задействовать несколько мультикоптеров, соединенных жесткой рамой. Однако проблема такой системы в том, что она содержит нескольких аналогичных компонент: самих беспилотников, а также их компьютеров и датчиков. Это не только увеличивает общую массу БПЛА, но и делает его довольно дорогим.
Инженеры из Италии и Швейцарии под руководством Фабрицио Скьяно (Fabrizio Schiano) разработали модульный беспилотник, конфигурацию которого можно адаптировать к необходимым форме, размеру и массе груза. Так они предлагают уменьшить количество составных частей и снизить его вес и стоимость. Мультироторный дрон состоит из двух типов модулей: одного центрального — вычислительного — и нескольких двигательных, которые питают винты. Все блоки инженеры прикрепили с разных сторон на посылку с помощью полиэстеровых ремней — сам груз стал телом дрона.
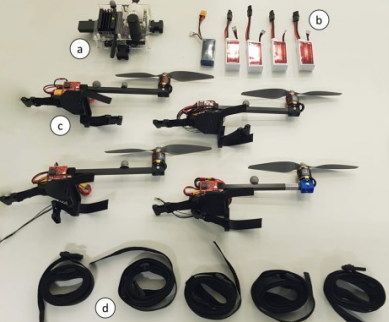 Комплектация дрона: а – центральный модуль, b – пять батарей, с – четыре силовых модуля и d – пять ремней из полиэстера для крепления модулей к посылке / Fabrizio Schiano et al., / arXiv, 2022
Комплектация дрона: а – центральный модуль, b – пять батарей, с – четыре силовых модуля и d – пять ремней из полиэстера для крепления модулей к посылке / Fabrizio Schiano et al., / arXiv, 2022
Чтобы облегчить сборку, инженеры разработали алгоритм, который определяет оптимальную конфигурацию беспилотника на основе габаритов груза и автоматически рассчитывает подходящие параметры для полетного контроллера. Пользователь должен указать только размеры и массу посылки, а затем следовать инструкциям программы, чтобы наиболее оптимально разместить модули.
После расчета правильной конструкции беспилотника программа автоматически формирует параметры управления на основе базы данных, созданной по результатам симуляций полетов дронов различных модификаций, и загружает их в центральный модуль управления полетом.
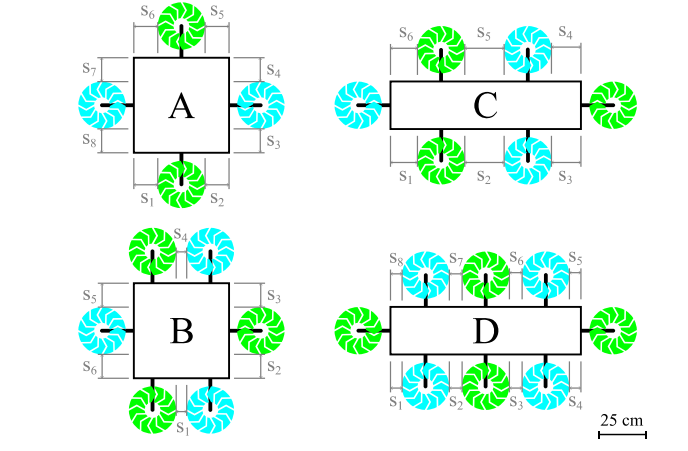 Схематическое изображение реконфигурируемых дронов с различными морфологиями, используемых в ходе экспериментов. По часовой стрелке и против часовой стрелки пропеллеры представлены соответственно зелеными и голубыми стрелками в кругах. Размерными линиями и стрелками показаны свободные промежутки между гребными винтами, которые вычисляются при позиционировании модулей / Fabrizio Schiano et al., / arXiv, 2022
Схематическое изображение реконфигурируемых дронов с различными морфологиями, используемых в ходе экспериментов. По часовой стрелке и против часовой стрелки пропеллеры представлены соответственно зелеными и голубыми стрелками в кругах. Размерными линиями и стрелками показаны свободные промежутки между гребными винтами, которые вычисляются при позиционировании модулей / Fabrizio Schiano et al., / arXiv, 2022
Инженеры провели несколько тестов с грузами, требовавшими разного количества и расположения двигательных модулей. Они перевозили посылки разной массы и размера. Также дрон проверили в условиях ручного контроля полета, зависания и полета по заданной траектории по фигурам Лиссажу. В помещении использовали систему захвата движения, на открытой местности — датчик RTK-GNSS. Тестовым грузом послужили пенопластовые каркасы весом 420 грамм. Как сообщают исследователи, все конфигурации были сгенерированы, собраны и автоматически запрограммированы с помощью программного обеспечения и успешно прошли испытания.
В дальнейшем итальянцы планируют сократить время, необходимое для подготовки дрона к полету, однако это далеко не единственное, что можно улучшить разработку. Например, сейчас двигательные модули располагаются на посылке симметрично, предполагая, что распределение веса однородно. Они хотят интегрировать алгоритмы оптимизации, которые смогут находить оптимальную конфигурацию модулей, когда ее центр тяжести не находится в геометрическом центре, а также изучить влияние более аэродинамической формы посылок на производительность дрона.
- Источник(и):
- Войдите на сайт для отправки комментариев
