Робожук спрятал крыло под надкрыльями
Швейцарские инженеры создали дрон, который по внешнему виду и конструкции похож на жуков: у него есть выдвижное крыло, которое в обычном состоянии спрятано за надкрыльями и выдвигается оттуда перед взлетом. При этом надкрылья выполняют не только защитную функцию, но и увеличивают подъемную силу во время полета.
Статья опубликована в IEEE Robotics and Automation Letters.
У насекомых из отряда жесткокрылых (Coleoptera), например, майских жуков (Melolontha), помимо основной пары крыльев есть также пара надкрыльев. Эти жесткие образования закрывают крылья вне полета и защищают их от повреждений.
Но исследования показали, что это не единственная их функция, и надкрылья — не просто защита, которую жукам приходится нести с собой во время полета. Оказалось, что они существенно повышают подъемную силу насекомого, а также увеличивают допустимый угол атаки, при котором не происходит сваливание.
Харалампос Воуртсис (Charalampos Vourtsis) вместе с коллегами из Федеральной политехнической школы Лозанны создали дрон с искусственным аналогом надкрыльев. У него есть раскладное крыло, состоящее из двух секций с каждой стороны, и прикрывающие их надкрылья. Они раскладываются и складываются сервомоторами за долю секунды. А в задней части у дрона есть два толкающих винта, которые при необходимости отклоняются по вертикали, позволяя управлять направлением полета.
Авторы провели симуляцию методом вычислительной гидродинамики и показали, что надкрылья создают дополнительную подъемную силу. Кроме того, они провели эксперимент в аэродинамической трубе, правда, использовали модель с единым, а не двухсекционным крылом.
Анализ движения потока воздуха показал, что надкрылья увеличивают допустимый угол атаки с 14 до 20 градусов. После экспериментов на модели, инженеры отправили робожука в полет и показали, что он может управляемо летать, несмотря на дополнительную массу от надкрыльев и сопутствующих сервомоторов.
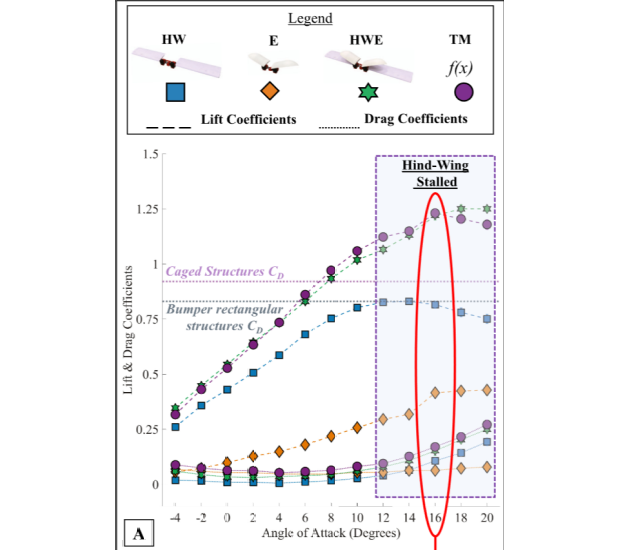 Зависимость подъемной силы от угла атаки для разных конструкций / Charalampos Vourtsis et al. / IEEE Robotics and Automation Letters, 2021
Зависимость подъемной силы от угла атаки для разных конструкций / Charalampos Vourtsis et al. / IEEE Robotics and Automation Letters, 2021
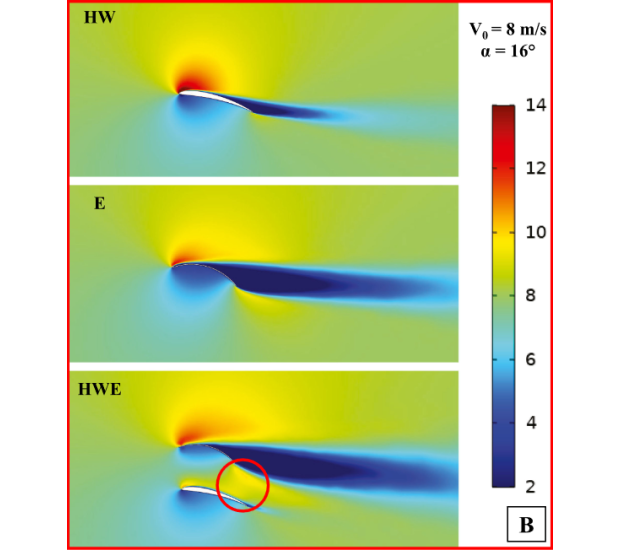 Симуляция поведения потока воздуха Charalampos Vourtsis et al. / IEEE Robotics and Automation Letters, 2021
Симуляция поведения потока воздуха Charalampos Vourtsis et al. / IEEE Robotics and Automation Letters, 2021
Этот робот повторяет лишь надкрылья жуков, но для создания основной подъемной силы использует винты и крыло. Но инженеры уже научились успешно копировать конструкцию махолета, и даже помогают ученым с помощью искусственных моделей лучше понимать полет настоящих животных.
- Источник(и):
- Войдите на сайт для отправки комментариев
