Корейцы научились управлять черепахой силой мысли
Корейские ученые продемонстрировали дистанционное управление движением черепахи посредством человеческой мысли. В основе метода — неинвазивный контроль инстинктивного поведения животного. Описание работы опубликовано в журнале Journal of Bionic Engineering.
В отличие от экспериментов по управлению движением животных за счет вживления электродов в мозг или мыщцы, корейские исследователи решили применить схему управления на базе контроля инстинктивного поведения черепах при преодолении препятствий. Черепахи распознают источник белого света как открытое пространство и инстинктивно движутся в его сторону (из-за чего, например, они сильно страдают при световом загрязнении мест обитания). При этом животные склонны избегать объекты, которые загораживают обзор: в предыдущей работе исследователи показали, что черепаха воспринимает черный цвет как препятствие и пытается обойти его. Черепахи оказались удобными объектами для эксперимента в том числе и потому, что на жестком панцире можно прочно закрепить необходимое оборудование.
Новый метод использует мозго-компьютерный интерфейс (brain-computer interface, BCI) в сочетании с устройством, которое передает команды от компьютера мозгу.
Система управления черепахой выглядит следующим образом: на голове оператора крепится гарнитура Emotiv Epoc и дисплей для отображения окружения черепахи. На панцире рептилии устанавливается «киборг-система» — она состоит из камеры, Wi-Fi передатчика, компьютерного управляющего модуля и батарейки, а также черного полуцилиндра с разрезом, который образует стимулирующее устройство. Цилиндр может поворачиваться до 36 градусов в каждую сторону под управлением «мыслей» оператора.
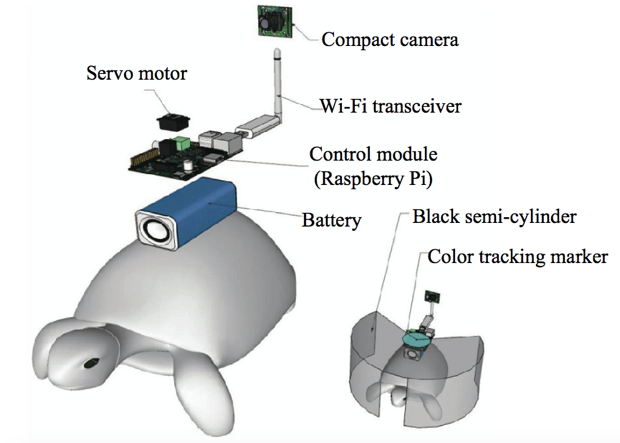 Схема оборудования черепахи. Устройство состоит из основного компьютера (Raspberry Pi), двигателя, аккумулятора, Wi-Fi трансивера, компактной цветной камеры и полуцилиндра с разрезом. Двигатель управляет позиционированием щели в полуцилиндре (на изображении она расположена непосредственно перед черепахой). Cheol-Hu Kim et al. / ScienceDirect
Схема оборудования черепахи. Устройство состоит из основного компьютера (Raspberry Pi), двигателя, аккумулятора, Wi-Fi трансивера, компактной цветной камеры и полуцилиндра с разрезом. Двигатель управляет позиционированием щели в полуцилиндре (на изображении она расположена непосредственно перед черепахой). Cheol-Hu Kim et al. / ScienceDirect
В процессе управления оператор в режиме реального времени получает видеоизображение с камеры, установленной на панцире черепахи, и определяет, в каком направлении черепаха должна двигаться. Мысленные команды распознаются гарнитурой мозго-компьютерного интерфейса при помощи электроэнцефалографических сигналов: система различает команды влево, вправо и бездействие. Команды влево и вправо активируют стимулирующее устройство черепахи через Wi-Fi, поворачивая цилиндр так, чтобы разрез цилиндра сместился в нужном направлении, вызывая инстинктивный поворот черепахи в нужную сторону.
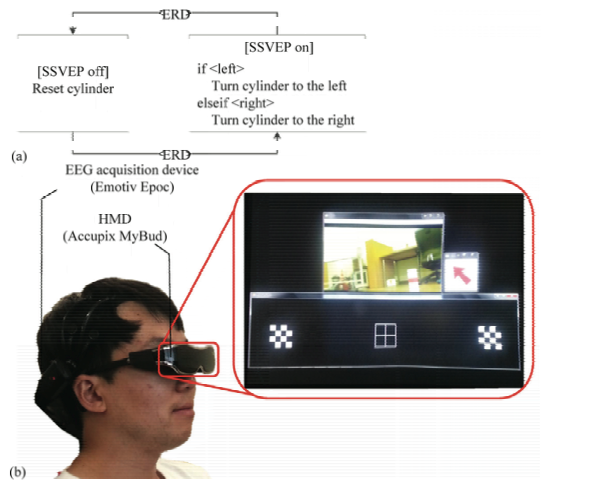 Оборудование мозго-управляющего интерфейса. а) Алгоритм контроля b) Управляющий механизм, состоящий из гарнитуры Emotiv Epoc и дисплея, на котором отображается местоположение черепахи. Cheol-Hu Kim et al. / ScienceDirect
Оборудование мозго-управляющего интерфейса. а) Алгоритм контроля b) Управляющий механизм, состоящий из гарнитуры Emotiv Epoc и дисплея, на котором отображается местоположение черепахи. Cheol-Hu Kim et al. / ScienceDirect
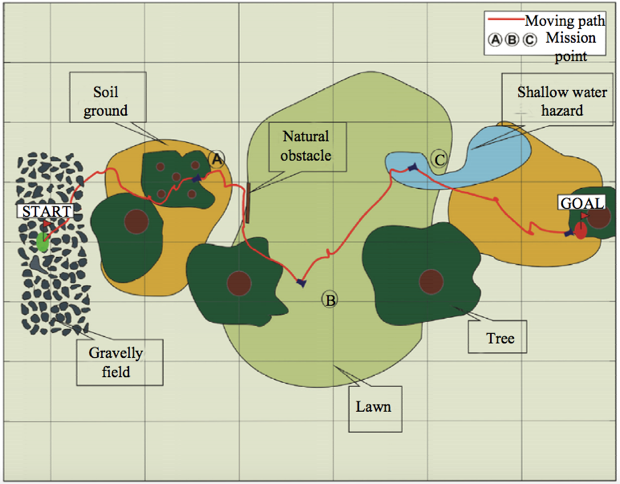
Для тестов ученые использовали четырех красноухих пресноводных черепах (Trachemys scripta elegans), а в роли операторов выступили пятеро студентов-добровольцев. Систему протестировали сначала в лабораторных условиях, а потом на открытом воздухе — при этом оператор находился в пяти километрах от животного. Тесты проводили в том числе и на пересеченной местности с естественными препятствиями, травой, гравийным покрытием и лужами. По словам авторов статьи, во всех тестах черепахи успешно справились с заданиями.
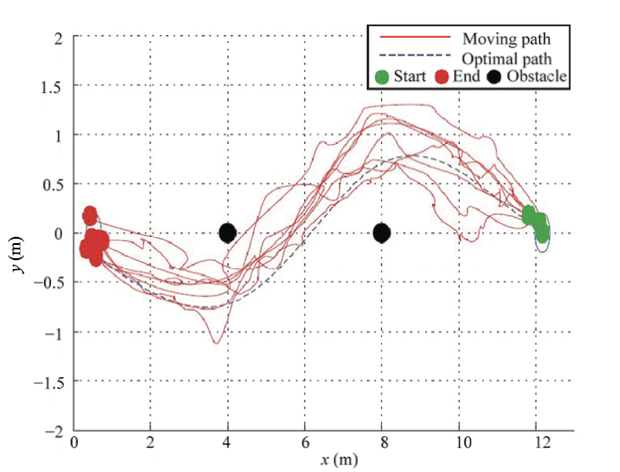 Траектории движения дистанционно-управляемых черепах в лабораторных условиях. Cheol-Hu Kim et al. / ScienceDirect
Траектории движения дистанционно-управляемых черепах в лабораторных условиях. Cheol-Hu Kim et al. / ScienceDirect
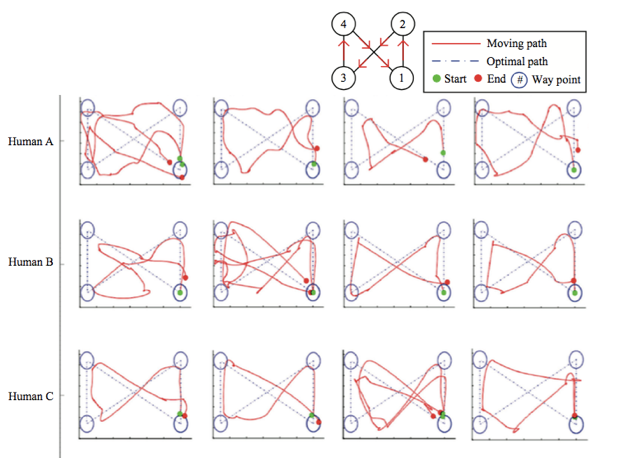 Траектории движения управляемых черепах в полевых условиях на дистанции в 5 км от оператора. Cheol-Hu Kim et al. / ScienceDirect
Траектории движения управляемых черепах в полевых условиях на дистанции в 5 км от оператора. Cheol-Hu Kim et al. / ScienceDirect
 Траектории движения управляемых черепах в полевых условиях на дистанции в 5 км от оператора. Cheol-Hu Kim et al. / ScienceDirect
Траектории движения управляемых черепах в полевых условиях на дистанции в 5 км от оператора. Cheol-Hu Kim et al. / ScienceDirect
Создание систем дистанционного управления живыми организмами — популярная тема современных технологий. Ранее мы писали об эксперименте с управлением насекомыми-киборгами с помощью оптогенетики, применении нейромышечных электродов для того, чтобы заставить бронзовку менять походку, и о шлеме, который позволяет управлять направлением движения человека при помощи пульта от радиоуправляемого игрушечного автомобиля. А если говорить об использовании инстинктивного поведения в дистанционном управлении, нельзя не вспомнить о забавном эксперименте с бульдогом, движение которого контролировали при помощи сосиски.
Автор: Надежда Бессонова
- Источник(и):
- Войдите на сайт для отправки комментариев
