Новую роборуку научили ловить предметы на лету
Многие представляют себе роботов в виде неуклюжих медлительных созданий. Но устройство, представленное швейцарскими инженерами из Федеральной политехнической школы Лозанны (EPFL), никак нельзя обвинить в недостатке ловкости. Их манипулятор на лету ловит предметы разной формы и размера с проворностью лучших бейсболистов.
Механическая рука полтора метра длиной имеет три подвижных сустава и сложную кисть с четырьмя пальцами. Для наблюдения за объектами используются несколько камер, расположенных вокруг робота.
Компьютер анализирует визуальную информацию, в реальном времени строит трёхмерную модель, за доли секунды рассчитывает траекторию полёта целевого объекта и определяет правильное положение манипулятора. В итоге устройство с лёгкостью ловит предметы самой разной формы, например, мяч, бутылку с водой или молоток.
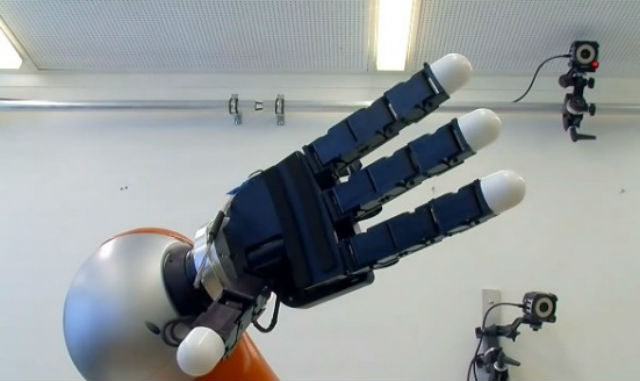 Рис. 1. Рука-манипулятор связана с системой камер и компьютером (фото Ecole Polytechnique Federale de Lausanne).
Рис. 1. Рука-манипулятор связана с системой камер и компьютером (фото Ecole Polytechnique Federale de Lausanne).
«Сегодня машины, как правило, запрограммированы на конкретные действия и не могут мгновенно реагировать на непредвиденные события, — объясняет соавтор работы Ойде Биллард (Aude Billard). — Чтобы поймать предмет, нужно постоянно пересчитывать траекторию, а на это обычно уходит слишком много времени».
Чтобы добиться необходимой скорости реакции исследователи научили робота действовать по принципу проб и ошибок.
Алгоритм не даёт манипулятору конкретные указания, как действовать. Вместо этого учёные кидали различные предметы по разным траекториям в то время, как один из членов команды вручную управлял устройством, показывая в каком положении нужно принимать «подачу» в той или иной ситуации.
В результате компьютер сопоставлял характеристики полёта объектов с необходимой ответной реакцией и в ходе дополнительных тренировок учился и оттачивал мастерство.
Эксперимент повторили с мячом, пустой и наполненной наполовину бутылкой, молотком и теннисной ракеткой. Выбор обусловлен тем, что все эти предметы ведут себя в воздухе по-разному, а их форма требует особых навыков для перехвата.
Например, бутылка с жидкостью меняет центр тяжести, что существенно влияет на траекторию её полёта. А молоток и ракетку нужно ловить за рукоятку.
Любопытно, что
механическая рука должна стать одним из элементов программы по очистке околоземной орбиты от космического мусора Clean-mE, разработка которой ведётся в Швейцарском космическом центре (Swiss Space Center). По плану манипулятор будет установлен на спутнике, чтобы захватывать летящие предметы, чья динамика зачастую непредсказуема. Пользуясь своими умениями, робот сможет наблюдать за целями и в реальном времени пересчитывать их траекторию и вращение для эффективного захвата.
Подробнее с удивительным устройством можно познакомиться в статье в издании IEEE Transactionson Robotics.
- Источник(и):
-
1. vesti.ru
- Войдите на сайт для отправки комментариев
