Дроны на МКС
Фактическая часть, ТТХ — Немного анализа: что скрыто за ТТХ, как подается цель дронов внутри орбитальной станции, и какова их участь на реальной МКС; почему так выходит — А как могло бы быть? Забираясь в фантазии, переходящие в ньювасюковщину.
1. Обзор дронов
1.0. Место действия: МКС
Почему идея дронов на МКС привлекательна?
Достаточно вспомнить основные претензии к дронам, когда их используют на земле: — очень шумно; — малое время полета.
И первое, и второе из-за того, что двигателям дрона приходится бороться с силой тяжести. Двигатели вынуждены работать выше некоторого порога мощности (иначе дрон просто не взлетит). Электромоторы быстро съедают батарею; нагруженные обмотки и винты, взбивающие воздух на больших оборотах, создают резкий и сильный звук.
На МКС, где силы тяжести нет, двигатели могут работать как угодно слабо. Можно очень экономно расходовать запас батареи; при этом не будет и сильного шума.
Более того. Поскольку МКС сама по себе довольно шумное место (принудительная вентиляция, множество стоек с постоянно работающей аппаратурой, системы жизнеобеспечения и поддержания ориентации станции — общее потребление порядка 50 кВт), то дрон, при умеренной работе двигателей, хотя формально звук и издает, но в практических целях его можно считать бесшумным. Не станет еще одной раздражающей звуковой помехой для людей на станции.
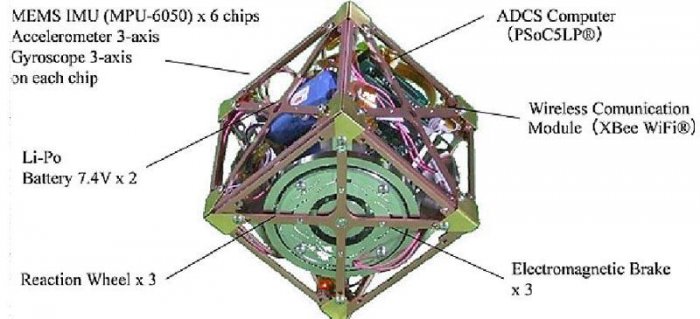
1.1. Сферы (США)
По паспорту, с игрой в акронимы: SPHERES (Synchronized Position Hold Engage Re-orient Experiment Satellites). Собственность NASA. Создан в MIT на грант DARPA. Масса: 4,3 кг. Размер: 22 см.
 (Источники графических материалов: NASA, JAXA, ESA.)
(Источники графических материалов: NASA, JAXA, ESA.)
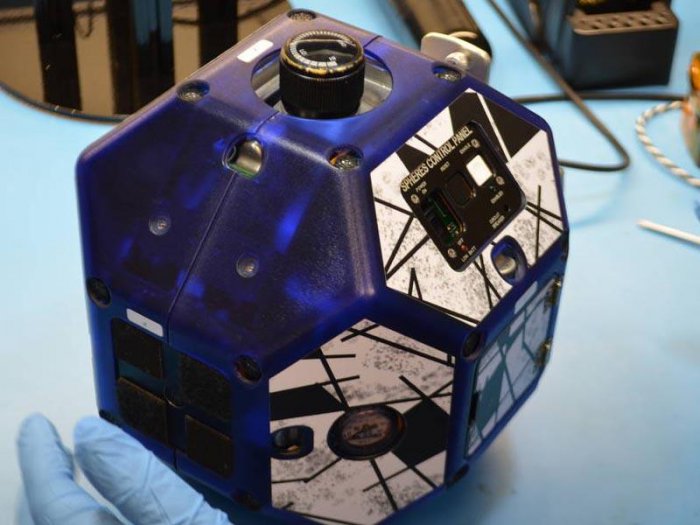
Несколько одинаковых дронов, из которых на орбиту попали три: Синий, Красный и Оранжевый. Сначала Синий, в далеком 2006-м. Чуть позже остальные, с усовершенствованными прошивками. Это не совсем дроны в том смысле, какой мы вкладываем в «дроны» на земле, имея в виду прежде всего любительские (квадро-) или профессиональные (гексо-, окто-) коптеры. Сферы не коптеры. У них не винты, а сопла. Чисто реактивное движение, на сжатом газе.
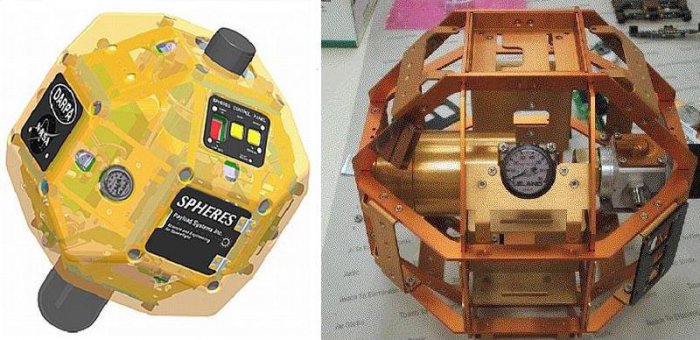
Баллон заряжается на 170 гр. Из него газ распределяется к 12 соплам. Максимальное ускорение: 17 см/с2по движению, 3,5 рад/с2 по вращению.
Но это именно что максимальные ускорения, в обычной работе ускорения и близко не такие. В реальных экспериментах Сферы двигаются очень медленно.
Полноценная связь: радиоканалы на частотах 868 и 917 МГц.
Сигнализация: инфракрасный сигнал.
Сенсоры: ультразвуковые приемники.
Видеокамер нет, но предусмотрены крепления для обвеса. Сначала в качестве видеокамеры использовался блок VERTIGO, основа которого две камеры для создания стереоизображения. Затем, когда распространились смартфоны, просто смартфон.

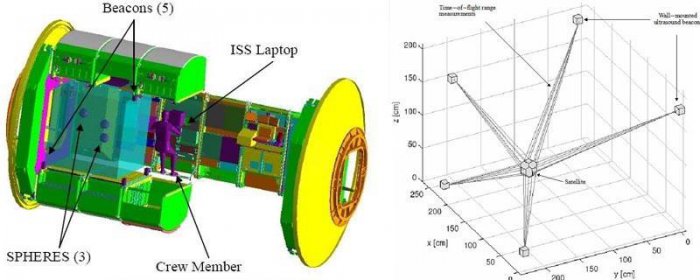
Изначально же навигация шла на ультразвуковых приемниках. Это даже не датчики расстояния, сами они ультразвук не излучают. Для этого внутри американской лаборатории были закреплены 5 маячков. Когда надо определить свое положение, Сфера дает инфракрасную вспышку. Это сигнал для маячков. Они по очереди, с разной задержкой, дают ультразвуковой сигнал. Сфера ловит эти пять сигналов. Исходная разная задержка нужна, чтобы сигналы гарантированно не наложились друг на друга, и анализ был как можно проще и надежнее — поэтому у маячков даже нет разных сигнатур. Фактическое время прихода сигнала дает вычислить вторичную задержку, связанную с расстоянием от сферы до каждого из маячков.
Все максимально просто. Возможно, потому, что начинали разработку студенты, которых взял на слабо их научный руководитель, напомнив эпизод из известного детского фильма.
Разработчики считали самым уязвимым местом электронную часть дронов — из-за космической радиации. Но дроны провели на станции более десяти лет, а проблемы пошли с системой распределения газа к соплам. Впрочем, выяснилось это уже на земле, при ремонте Синего, спущенного на «Драконе».
Схожие симптомы, не такие серьезные, настигли и Оранжевый, но пока он остается на станции.
1.2. Шарик (Япония)
Int-Ball (Internal Ball Camera). Собственность JAXA. Масса: 1,4 кг. Размер: 15 см.
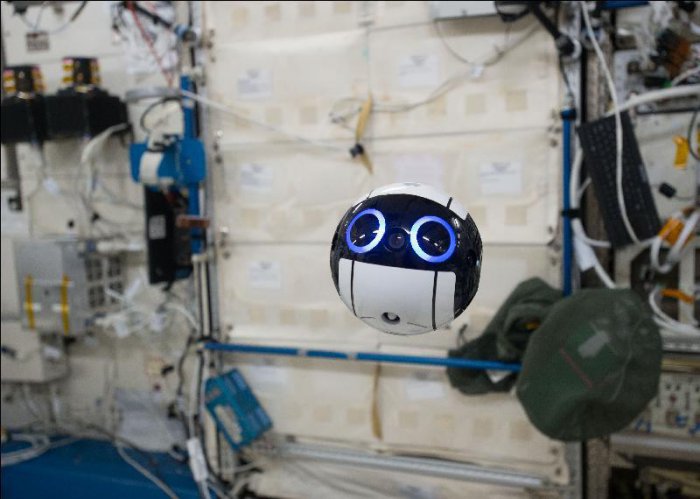
Это летающее мимими доставили на МКС летом 2017-го, но всерьез использовать стали лишь через год, когда на станции был японский астронавт. Впрочем, формально и сейчас статус Шарика все еще донастройка. Для перемещения у него 12 крохотных винтов. А вот для вращения — уже есть блок гиродинов.
Есть прямое, без костылей (как у Сфер), беспроводное подключение к лэптопам станции. Можно подумать, что в глазах стоят видеокамеры, но нет.
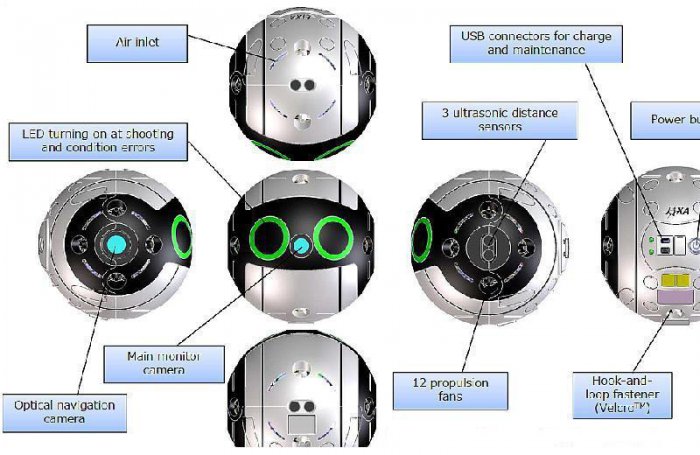
Главная видеокамера в носу. Глаза — просто индикаторы. На самом деле они серые. Когда они светятся синим — это сигнал, что работает главная камера. В случае же сбоя системы, они загораются красным, и вид у Шарика становится неожиданно агрессивным.

Уже гуляет байка, что в первый раз Шарик напугал не ожидавшую такого американскую астронавтку.
С правого борта стоит вспомогательная камера, навигационная. Для нее в японской лаборатории поставили два маркера (та вырвиглазно-розовая нашлепка). Обычно они в разных концах модуля, один под порогом, другой на крышке мини-шлюза, но можно свободно перемещать.
На левом борту Шарика стоят ультразвуковые датчики расстояния.
В связи с модными поветриями, подчеркивается, что детали корпуса печатались на принтере. (И потом долго шлифовались и полировались, чудес не бывает.) В автономном режиме Шарик еще не работал. Его движение контролируют два оператора в японском ЦУПе. Раз в месяц обновляется видеодневник.
1.3. Саймон (Европа, конкретнее Германия)
CIMON (Crew Interactive Mobile companion), в честь Prof. Simon Wright. Под эгидой ESA, сделано Немецким центром авиации и космонавтики на немецких мощностях Airbus'а, при участии IBM. Масса: 5 кг. Размер: 32 см.
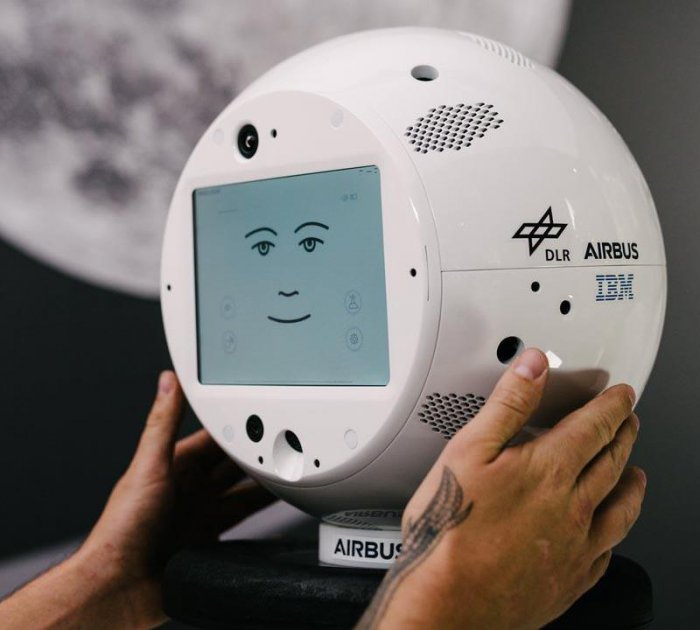
Доставлен на МКС «Драконом» этим летом.
Подробного описания пока не представлено, есть только самые общие данные: 14 винтов. На носу монитор и видеокамера, по бокам еще две вспомогательных.

Система на Linux. В IBM сделали портативную версию Watson'а, не требующую для работы ни десятков серверов, ни связи с землей.
Если вдруг вы решили, что уж дроны-то «с ИИ от IBM!» могут нормально маневрировать, и теперь наконец-то это хоть немного выглядит круто — то вот его съемки на воздушных горках. В первом же тесте оказалось, что его расчетные способности маневрировать слабее, чем остатки неинерциальности на европейской летающей лаборатории (гордо именуемой ZERO-G).
Планировалось, что в октябре с ним начнет работу немец Александр Герст, распознавание голоса и лица было заточено под него. А уже зимой Саймона спустят обратно на землю. Но, видимо из-за заражения станции злобными гремлинами, сроки сдвинулись. О начале можно будет узнать в твиттере Герста.
2. Анализ
Ну и для чего же дроны на МКС? Есть парадные заявления создателей, есть пресс-релизы агентств, — но понятно, что большей частью это все бюрократическое пустословье, где перспективы раздуты, как лягушка через трубку, а неудобные вопросы заметены под ковер.
2.1. Для чего Сферы?
Прежде всего, попробуем понять: разумна ли конструкция?
Внутри МКС есть воздух. Но движители Сфер используют чисто реактивный принцип. Это значит, что при работе дрона есть ресурс, который постоянно тратится. Логичный вопрос: а как этот ресурс восполняется? Может быть, перезаправить дрон можно прямо на МКС (то есть с практическом точки зрения никакой ресурс не тратится)? Может быть, вместе с дроном был доставлен на МКС какой-то компрессор? Нет. В дроне используются сменные баллоны со сжиженным углекислым газом. После использования в дроне их надо спустить на землю, там заправить, и снова поднять на МКС.
Более того, даже электрическое питание дрона не на аккумуляторе, что казалось бы очевидным, а на батарейках. Одноразовые батарейки AA, два блока по 8 штук. Меняются на свежие каждый раз перед использованием, ориентировочно должно хватать на 2 часа. После чего их можно только отправить на землю, а дрону нужны свежие.
Чем можно оправдать такое странное решение?
Может быть, идея была в том, что хотя работать дрон будет внутри МКС, но имитирует движение за ее пределами, в вакууме? Там, где воздуха нет? А может быть, даже предназначен на тот случай, если произойдет разгерметизация МКС? Тогда он мог бы передвигаться внутри станции в вакууме, как не сможет дрон на винтах. Такое могло бы пригодиться. Штатный способ поиска утечки — по звуку, но такой способ работает только если утечка крошечная, и воздух уходит медленно.
Но сами создатели заявляют, что для использования в вакууме дрон не предназначен. Тогда, может быть, причину обнаружим в экспериментах, в которых использовались эти дроны?
 Эксперимент Кольца
Эксперимент Кольца
Две Сферы, на каждую добавляется по обвесу с катушками индуктивности (Кольцо). В таком виде дроны могут магнитно взаимодействовать — отталкиваться, притягиваться, взаимно закручивать друг друга. Бесконтактно подзаряжать друг друга.
В чем идея. Причина завершения большинства (успешных!) космических миссий в том, что исчерпывается горючее. Аппарат отработал свою базовую программу, и все еще прекрасно функционирует, мог бы служить и служить еще, — вот только топлива в двигателях больше нет. Корректировать траекторию полета далее невозможно. Что еще хуже, невозможно разгрузить гиродины, и аппарат больше не может сохранять ориентацию антенны на землю и панелей к солнцу — пропадает связь с землей, питание… А можно ли обойтись без регулярного расхода пропеллента? Если расставить несколько таких «колец» (например, на поверхности МКС), то между ними можно гонять маленький спутник сколько угодно, совершенно не тратя топлива, — достаточно электропитания, которое обычно не проблема.
На уровне общих слов это все забавно. Но трудно представить себе реальный вариант использования — где и для какой практической цели такое может понадобиться? Кроме того, сам эксперимент в том виде, как проводился, совершенно бессполезен, настолько элементарные вещи в нем делались. Что это дает? Для чего это было?
Эксперимент Вертиго
С 2008 года начинаются предложения и попытки сделать апгрейд Сфер, чтобы их навигация строилась не на маячках, а на анализе видео. В 2010-м проект берет на финансирование та же DARPA, в том числе появляются эти вот очки для дрона. Вроде бы, очевидная и полезная идея — поработать в трехмерном варианте с тем, что в двумерном варианте сейчас делают прототипы автомобильных автопилотов. К тому же предпринятая до того, как эта тема стала бумом. Но это с одной стороны. А с другой — меньше всего для этого подходит реализация дрона в виде Сферы.
Даже если закрыть глаза на то, что Сферы жутко медленные, как быть с тем, что начало полета требует траты человеческого времени (проверить давление в баллоне и заменить, если требуется; заменить комплекты батарей на новые), и очень ограничен налет часов (требуется частая смена баллонов и батареек, причем с доставкой с земли)?
«Эксперимент» Гало
В кавычках, потому что проект заключается в том, что на дрон крепится бампер, на который можно навесить что-нибудь еще.
Наверно, это имело бы какой-то смысл — если бы дрон можно было использовать как регулярный дрон-инспектор хотя бы внутри станции. Но Сферы так использовать невозможно, не те ТТХ. Так для чего тогда это все? А вот для чего. Например, на обвесы навешивались «стыковочные узлы», и дроны стыковались один с другим. Разве не чудо?
Или вот еще: два дрона связывали веревочкой, и смотрели, как один может тянуть другой. И оказывается, что это имитация захвата космического мусора. Изумительно! Разве нет?
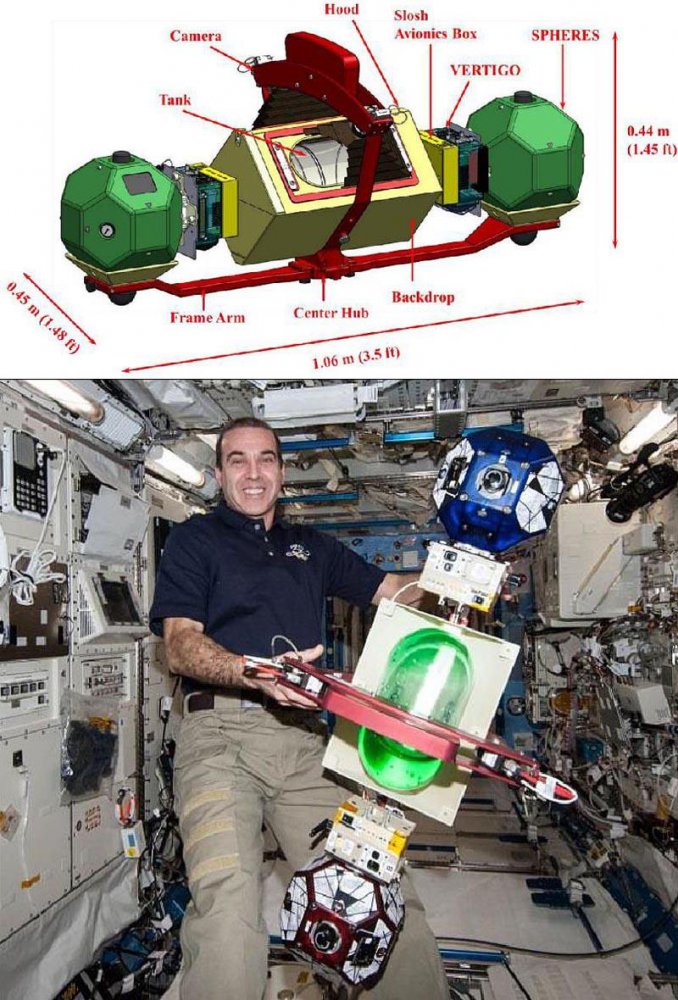 Эксперимент Плеск (Slosh)
Эксперимент Плеск (Slosh)
К специальному коромыслу крепятся: по концам две Сферы, а в серединке прозрачный баллон, частично заполненный жидкостью. Сферы используются для закручивания, потряхивания, колебаний и пр. Камера рядом с баллоном снимает, что при этом происходит внутри. Использовались разные степени заполнения, и жидкости с разными свойствами.
Понятно, что прежде всего это аналогия того, что может происходить в емкостях с горючим, когда они оказываются в состоянии, близком к невесомости. Поэтому эксперимент идет с участием реальных крупных производителей.
В целом, этот эксперимент выглядит максимально убедительным из всех прочих. Что же заставляет все-таки использовать оговорки? Конструкция с коромыслом и Сферами в качестве ее ускорителей — крайне топорная вещь. Работа движителей Сфер, особенно с течением времени, далека от прецизионной. Использование Сфер как части установки накладывают на эксперимент и жесткие ограничения по длительности, их невозможно вести длительное время и в автоматизированном режиме (сессии со Сферами — пара часов в несколько недель). Кажется, что если бы в подобных экспериментах был реальный интерес, то было бы выделено место в стойках, и туда был бы установлен небольшой аппарат-встряхиватель, заточенный под такие эксперименты. А если уж места в стойках не нашлось, то и тогда: не разумнее ли было сделать вокруг баллона раму с гиродинами, чем приделывать длинные концы, к которым вешать Сферы, довольно объемные, но слабые и неточные по создаваемым ускорениям?
То есть сомнения в нужности Сфер для подобного эксперимента остаются. И подкрепляются тем, что все следующие модели дронов ни для чего подобного использовать не пытались.
Так для чего же нужны были Сферы? Дать студентам поэкспериментировать — и их опыт и заинтересованность идти в космическую сферу тут важнее, чем реальная польза от конкретных Сфер на МКС?
Или, погружаясь в липкую конспирологию, прямо наоборот: DARPA финансировало этот проект, чтобы запутать доблестных российских и китайских военных? Мол, поглядите, какие беспомощные прототипы спутника-инспектора у нас выходят… Были бы и нас классные спутники-инспекторы — разве финансировали бы мы такое обнять-и-плакать? Нет у нас спутников-инспекторов!
Или дело в том, что лишние бюрократы в НАСА и DARPA, не приносящие реальной пользы, вынуждены создавать видимость работы, чтобы оправдать свое существование? Это все просто «осваивание» средств? А заодно и формальное заполнение графика работы астронавтов — «не зря же мы их возим туда и обратно»?
2.1. Зачем нужен Шарик?
Вот здесь цель заявляется сразу, очень четко и очень убедительно. Давайте присмотримся, как устроены эксперименты с участием людей на МКС.
Человек, еще на земле, учит план работ, тренируется. Но! Поскольку забрасываются люди на МКС на полгода, и их там немного, то невозможно сделать так, чтобы астронавт был идеально готов к каждому своему эксперименту, и делал его со сноровкой лаборанта, работавшего с подобной аппаратурой годами. А проделать эксперимент требуется более-менее быстро, не тупя, есть график. Поэтому практически каждый эксперимент проходит под наблюдением ЦУПа. Астронавт устанавливает на кронштейне камеру, нацелив на место, где будет работать. И в ЦУПе могут не просто отвечать на его вопросы, — но и сразу поправить, если он уже что-то делает неверно, сам не замечая.
Разумеется, стационарная камера на кронштейне — не идеальный вариант. Иногда требуется показать картинку вблизи — то, что под его пальцами. Иногда это по-настоящему важно. Эксперимент можно перенести или отменить, а вот в случае с профилактикой или ремонтом систем жизнеобеспечения деваться некуда, и ошибка может привести к большим трудностям. Поэтому приходится звать кого-то из экипажа на помощь: один работает, другой держит камеру, снимая из-за плеча. Японцы утверждают, что на возню с камерами уходит до 10% времени.
Тут, конечно, не до конца ясно, не лукавое ли это утверждение — считали они внутри рабочего время астронавтов, или включили все что можно: космонавты в свое свободное время любят фотографировать в иллюминаторы; считается хорошим тоном каждому записать свою видеоэкскурсию по станции, хотя бы раз за экспедицию; надо вести влоги и участвовать в видеомостах, потому что этого требуют от них для популяризации/по политико-имиджевым причинам. Так что в действительности процент времени может быть другим.
Но сути это не меняет: почему бы не высвободить это время на что-то действительно полезное? Шарик и заявляется как такая универсальная подвижная камера, которая должна спасти это время. Работает ли дрон так в реальности?
С Шарика идет довольно посредственная картинка (если сравнивать с полноценными камерами с хорошими объективами, которые крепятся на МКС к кронштейнам). А какая еще картинка может идти с компактной камеры с крошечным объективом?
С подвижностью еще хуже. Ограничения на резвость Шарика, очевидно, связаны с перестраховкой, мощность винтов занижена специально. Это в будущем может быть изменено, если программная часть (навигации по картинке и маневрирование) будут надежными и эффективными. Но вот как раз с этим пока большие проблемы. Если брать за точку отсчета аналогичные «земные» технологии, — то, что делается в сфере автомобильных автопилотов, — то кажется, что эти специалисты и разработки не были привлечены, и в JAXA все делается с нуля, чуть ли не новичками в этой сфере.
Однако самая большая проблема даже не в этом. Допустим, Шарик способен уверенно распознавать окружение, и точно маневрировать в нем. Хватит ли этого, чтобы дрон стал помощником-оператором — как, скажем, другой член экипажа с камерой?
Владельцы дронов прекрасно знают ответ. Автопилот хорошо отрабатывает, когда ему поставлена четкая задача: введены чекпойнты траектории, или задан ведущий объект. В случае с автомобилем такой сценарий использования вполне удобен. В случае с дронами требуется большее — взаимодействие с оператором по мере уточнения полетного задания, в том числе и не оговоренные заранее условия посадки (вспомните все смешные, через слезы, истории дронов, не давшихся в руки хозяину).
Для дрона-помощника на МКС (помощника в реальности, а не по пресс-релизу) будет требоваться прежде всего взаимодействие с человеком. Удобное взаимодействие. Не поверхностно, на уровне четких словесных команд или формально прописанных жестов как у регулировщика движения. А так, как это происходит в случае двух реальных людей, делающих что-то вместе. Вы предугадываете чужие действия и намерения по началу жеста, по тому, куда направлен взгляд, в качестве поощрительного приказа может быть просто быстрая оглядка, и прочие мимико-поведенческие реакции, очевидные в реальной ситуации, и предельно сложно формализуемые.
Но чтобы это стало реальностью, дрон должен быть оснащен очень сообразительным ИИ — способным не просто на маневрирование, а на понимание происходящего. В противном случае его использование будет не помощью, а еще одной сложной задачей, которую космонавт будет вынужден держать в голове параллельно основной работе. Будет только лишняя нагрузка, раздражение, ошибки.
Разработка подобного взаимодействия сейчас в самом зачаточном состоянии прежде всего потому, что в таком состоянии разработка сильного ИИ. Без создания сильного ИИ у этой задачи может быть в лучшем случае эрзац-решение, аналогичное нынешним автоматическим переводчикам — подстрочник с ошибками, который требуется корректировать сильным ИИ в виде человека. Без сильного ИИ дрон-помощник надо будет так или иначе постоянно контролировать — и регулярно вмешиваться в его действия! — операторам на земле.
2.3. А вот и Саймон!
Видимо, разработчики Саймона это понимают. Понимают и то, что с экономической точки зрения схема, которую используют японцы с Шариком — как минимум два постоянно занятых специалиста на земле, чтобы спасти 10% времени одного космонавта, — это в лучшем случае баш на баш. Поэтому и цели заявляют иные.
Саймон будет просто ненавязчиво следовать за хозяином, быть его голосовым помощником, плюс к этому собирать данные для психологического анализа состояния экипажа.
То есть. Предлагается взять технологию, уже реализованную в земных дронах. Затем дать космонавту на орбите искусственного (читай, тупого) голосового помощника — когда у космонавта в наушнике и так есть живые помощники в ЦУПе. А как вишенка, делать пассивный вариант того, что на земле делается в активной форме, куда более изощренными методами в проектах типа «Марс 500». Если это не большой шаг для всего человечества, то что же это? Несмотря на все это, от Саймона все же может быть реальная польза. Только не связанная со всем вышеперечисленным, неочевидная для составителей пресс-релизов.
2.4. Космический груминг
Если смотреть ролики с МКС внимательно, обращая внимание на поведение космонавтов, можно заметить забавную вещь, — совсем не очевидную заранее, даже если вы хорошо знаете физику и понимаете, что такое невесомость.
Эмпирический факт: человеку в невесомости проще иметь дело с большими массивными вещами, чем с маленькими и легкими. Трудности начинаются, когда вы выпускаете из рук небольшую вещь.
Казалось бы, в чем проблема? Ну просто «положи» вещь в воздух, и она будет там висеть. Невесомость же! Разве это не удобнее, чем на земле, где вещь может упасть, и прежде чем выпустить что-либо из рук, надо найти какую-то надежную опору, на которою можно положить?
Проблема в том, что человек не может с достаточной точностью «положить» вещь в воздухе. На земле мы привыкли класть вещи на разные поверхности, но всегда при силе тяжести. Отпустил — и сила тяжести прижимает к поверхности, а сила трения не дает сдвинуться вбок. Возникает иллюзия, что сам человекможет так точно оставлять вещи в состоянии покоя, — потому, что идеально контролирует свои движения и приложенную силу.
В невесомости эта иллюзия быстро развеивается. Оказывается, что если человек хочет «положить» в воздухе вещь, как клал ее на стол, — это так больше не работает.
Даже если человек очень старается оставить предмет неподвижным в воздухе, отпуская и уводя руку крайне осторожно, предмет все равно оказывается движущимся с небольшой остаточной скоростью. А уж если человек отпускает какую-то небольшую вещицу походя, без особого внимания… На первый взгляд, скорость у вещи не такая уж значительная. Но она постоянная, и никуда не пропадет. И уже буквально через несколько секунд оказывается, что предмет уходит за пределы, в каких космонавт может достать, просто вытянув руку. И требуется какое-то решение. Либо дать вещи уйти, но потом придется летать за ней уже всем телом, а не просто шевельнуть рукой, — либо надо схватить вещь прямо сейчас и вернуть обратно. (Например, груминг планшета — внимание не на лицо говорящего, а на его руки.)
Лучше всего — просто держать и больше не отпускать. Но если вы хотите взаимодействовать с несколькими предметами одновременно? Вы не можете оставить один из предметов «висеть» больше чем на несколько секунд. Вам постоянно приходится возвращаться к этому предмету и «перекладывать» его, уплывающий, обратно. А в случае, если предмет — планшет, на экране которого вы что-то смотрите, а его камера должна снимать вас, проблема усугубляется тем, что помимо остаточных скоростей, есть еще остаточная скорость вращения. Планшет будет не просто потихоньку уплывать, но и потихоньку отворачиваться от вас. Все это приводит к тому, что космонавты либо держат в руках то, с чем работают, либо занимаются космическим грумингом — постоянно поправляют предметы, оставленные висеть в воздухе.
Многие фанаты космонавтики, даже посмотрев изрядное количество роликов с МКС, не замечают: практически все предметы на станции — с наклейками папа-липучки. А кусочки мама-липучки тут и там на «столах», «верстаках», стенках станции, некоторые модули вообще целиком ей покрыты. Помимо липучки, на станции тут и там карманы из резиновой сетки. А что-то цепляют на карабинчиках. Для лэптопов и камер кронштейны. Все это для той же цели — как-то решить проблему космического груминга.
И в этом смысле, у Саймона есть уникальная полезная функция: он может использоваться как экран, который можно «положить» в воздухе. Далее Саймон сам будет удерживать и позицию, и направление экрана (и камеры) на астронавта. Ему не нужен груминг. Вопрос в том, стоило ли для этого отправлять предмет увесистый и объемный, — а не маленький компактный дрон, к которому можно было бы просто прикреплять планшет?
2.5 Основная проблема дронов на МКС
Дроны просто не нужны на МКС — для них нет задачи. Точнее, для них могли бы найтись задачи, но для решения этих задач дроны должны быть не игрушкой по типу «напихаем всего модного, к чему-нибудь да сгодится», а заточенными под выполнение конкретной функции.
3. Прекрасные дроны будущего
Из реальных задач, для которых дроны в принципе могли бы быть полезны на МКС, сейчас есть две:
- Снимать работу космонавтов;
- Избавить людей от космического груминга.
Если искать решение конкретно этих задач прямо сейчас — то надо использовать то, что может работать прямо сейчас, и работать эффективно, полностью решая заявленные цели. А не делать что-то невнятное, оправдываясь тем, что «мы развиваем подходы к технологии, чтобы когда-нибудь в будущем…»
3.1. Рацпредложения
Сейчас и в ближайшем будущем дроны на МКС не должны:
— всерьез полагаться на зачатки ИИ (потому что они слишком зачатки);
— использовать для навигации распознавание видеосигнала (не отлажено до конца, и избыточно в замкнутом окружении, где все контролируется);
— отяжелять конструкцию бесполезными аналогами специализированных приборов, уже имеющихся на МКС в лучшем качестве (никаких встроенных камер, никаких встроенных планшетов, никаких процессоров сверх минимальных контроллеров устройств).
Дрон должен быть лишь собственно рабочим инструментов — блок гиродинов, вентиляторы, батарея, беспроводная связь, и на этом все. (Максимум — еще несколько самых крошечных камер смартфонного типа, и только для того, чтобы их видеопоток сквозным образом перебрасывался на процессорный блок в стойке, обработка только там.) Причем все детали как можно более миниатюрные. Если предыдущие дроны имели размеры баскетбольного меча, гандбольного, и малого пляжного, — то идеальный МКС-дрон должен быть куда меньше, стремиться к размеру теннисного мячика.
То есть:
Процессорные мощности вынесены в одну из научных стоек, чтобы дрон не таскал этот огромный лишний груз (не забываем, что помимо самого вычислительного модуля, дрон вынужден таскать еще и питание для этого модуля!).
Для навигации использовать исходную схему Сфер, но в инвертированном виде: сам дрон дает сигналы как два маячка (с правого и левого борта), эти сигналы считываются детекторами, закрепленными в углах модулей станции, и триангулируются по задержке; вместе с внутренними данными дрона — датчиков ускорения, работы электродвигателей и гиродинных колец, — этого достаточно, чтобы определить как положение дрона, так и его ориентацию, и их производные.
В прокладывании маршрута используется уже готовая модель окружения (МКС большой объект, но вполне обозримый), размеченная ручками, и обновляемая при необходимости оператором, без игры в распознавание образов с видеосигнала. Для контроля окружения используется картинка с закрепленной (не на дроне) камеры в модуле, где сейчас дрон — и этот контроль осуществляется оператором. Нейроалгоритмы если и используются, то только для решения низкоуровневых вспомогательных задач, для которых они уже достаточно хороши.
Сам дрон обрабатывает информацию по минимуму. Лишь сбрасывает свои внутренние данные на компьютер в стойке, а от него получает конкретные инструкции на работу оборудования. На дроне есть места креплений. Разнотипные. Это и защелки с электроуправлением (комплиментарная часть защелки крепится к предмету, который дрон должен использовать), и просто стандартный для станции кусок мама-липучки (в невесомости и этого достаточно, чтобы связать дрон даже с довольно массивным объектом). В любом случае, это должно быть минимальное крепление, гораздо миниатюрнее огромных избыточных бамперов Сфер. Когда требуется видео работающего космонавта, к дрону пристегивается видеокамера — штатная большая камера/фотоаппарат, которые есть на МКС. Дрон потихоньку буксирует ее и крутит, когда ЦУПу надо сменить ракурс наблюдения за рабочим местом космонавта. Обсчет нужного маневра ведется на земле/на стоечном компьютере, сам дрон получает только элементарные приказы на двигатели.
Чтобы для космонавта это было действительно облегчением, а не лишней головной болью, в научной стойке, где выделено место для процессорного блока дрона, должно быть выделено и место для его дока — чтобы автопарковка и подзарядка, как это уже давно сделано в пылесосах. А лучше — чтобы дрон не один, а с возможностью работать каруселью: с точки зрения космонавта дрон выглядит вечнозаряженным, лишь изредка рядом с рабочим дроном появляется его копия, между ними происходит (автоматическая же) передача буксируемого предмета, после чего отработавший дрон удаляется на подзарядку.
Помимо работы видеооператором, подобная конструкция даст возможность использовать дрон и для борьбы с грумингом.
Аналогично камере, дрон может удерживать позицию и ориентацию прилепленного к нему смартфона/планшета; буксировать этот экран за хозяином; компенсировать отдачу, когда космонавт тыкает в экран планшета, не придерживая его другой ругой. Или при ремонтных работах «держать» в воздухе рабочую авоську/небольшой «столик», с липучками и магнитами для мелких вещей и крепежа, рядом с космонавтом так, как ему удобно, — избавляя от необходимости каждый раз расправлять спутавшуюся авоську, или снимать нужную вещь с карабина на поясе, а потом туда же крепить, и т. д.
То есть это должен быть просто универсальный удерживатель-в-воздухе для других вещей. Не носитель для каких-то абстрактных «научных приборов», а под те предметы, которые реально и постоянно используются на станции в быту.
И при дальнейшей развитии такого подхода:
Лучше представлять себе даже не пару дронов, работающих посменно с одной вещью возле одного из космонавтов, — а целый их рой на станции, работающий каруселью. Несколько экземпляров постоянно находятся в каждом модуле станции, готовые действовать и без специальных процедур инициализации. Они в фоновом режиме начинают подталкивать, чтобы затомрозили и не вращались, предметы рядом с космонавтом, если эти предметы выпущены из рук, но не прилеплены к стенке на липучку/не закреплены иным образом, и внимание человека явным образом распределено между несколькими такими предметами.
3.2. Что дальше — в реальности?
Очередность, в какой на МКС появлялись дроны, в миниатюре отражает уровень технологического развития стран. Лидер что-то делает, затем подтягиваются остальные, кто в состоянии конкурировать: сначала США, затем, с сильным отрывом, Япония, Германия… Понятно, что появления России даже в этой миниатюрной гонке ждать не стоит.
Тогда выходит, что теперь снова очередь США? Учтя свой опыт, поглядев на потуги партнеров, теперь НАСА должны вывести эту гонку на новый технологический виток?
Видимо, что-то там действительно потихоньку планируется. По крайней мере, НАСА проводит своего рода мозговые штурмы, объявляя публичные конкурсы на разных хакатонах.
К сожалению, решения, предлагаемые на таких конкурсах, оказываются испорчены ошибочными стереотипами о том, какие условия, проблемы и задачи есть на МКС. Концепты делаются старательно, но бездумно, по принципу «давайте слепим в дрон все, что мы можем, и вдруг для чего-то он окажется полезным?».
Автор: smrl
- Источник(и):
- Войдите на сайт для отправки комментариев
