Жестикуляция в небе: влияние динамики крыла на эффективность полета
Блог компании ua-hosting.company. Для достижения господства в небе птицы прошли очень долгий эволюционный путь. Структура их тела, мышцы, кости и оперение — все это играет важную роль в полете. Человечество, желающее покорить небеса и вдохновляясь птицами, начало создавать различные аппараты, которые в той или иной степени имитировали определенные физиологические особенности пернатых летунов. Крылья, хвост, даже нос современного самолета созданы с оглядкой на физические законы и на птиц, которые эти законы используют в свою пользу.
Однако между, скажем, вороном и самолетом есть много структурных отличий. Во-первых, у самолета нет оперения, а во-вторых, самолеты крыльями не машут, что не может не радовать. Тем не менее ученые из Лундского университета (Швеция) решили уделить внимание именно подвижности крыльев, чтобы установить, как то или иное положение крыла влияет на эффективность полета. Что удалось выяснить ученым, и как это может повлиять на робототехнику? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Небо уже давно перестало быть чуждым человеку, но назвать наш вид господствующим в небесах сложно. Самолеты, вертолеты, дроны, летающие роботы разной конструкции уже не удивляют, но их функционал и эффективность не могут сравниться с настоящими владыками небес — птицами. Изучение птиц и их умения летать длится уже не одно столетие, но сложная кинематика и аэродинамика их полета все ставит много вопросов.
В последние годы аэродинамика полета птиц изучалась с использованием передовых методов, таких как высокоскоростная трехмерная кинематика и велоциметрия изображений частиц (PIV от particle image velocimetry), что позволило улучшить наши знания о естественном полете.
Однако обучение птиц работе в лабораторных условиях требует много времени. Кроме того, птиц нельзя заставить двигать крыльями за пределами их естественного движения. Это ограничение делает невозможным систематические исследования альтернативной кинематики крыла, таких как различные взмахи, скручивание и складывание, влияющие на аэродинамические характеристики. Тем не менее необходимо выйти за рамки естественных движений, чтобы понять, почему птицы двигают крыльями так, как они это делают, и лучше понять влияние различных кинематических параметров на эффективность полета. Альтернативным методом изучения этих вопросов может быть теоретическое исследование, но и оно дает крайне ограниченные данные.
В рамках робототехники на данный момент существует очень малое число роботов, которых используют для изучения связи между кинематикой и аэродинамическими характеристиками при машущем полете. Основное внимание уделялось небольшим насекомоподобным системам с плоскими нескладывающимися крыльями и высокой частотой взмахов, а также летучим мышам-роботам с гибкими мембранными крыльями. Те немногие роботы, используемые для изучения машущего полета птиц, обладают весьма упрощенной геометрией крыльев и/или уменьшенными кинематическими возможностями по сравнению с птицами. Крылья «роботов-птиц» либо похожи на крылья летучих мышей (мембранная структура), либо лишены возможности складываться. Другими словами, крылья роботов не могут сравниться с крыльями птиц в подвижности, которая играет важную роль во время полета в тех или иных условиях.
 Изображение №1
Изображение №1
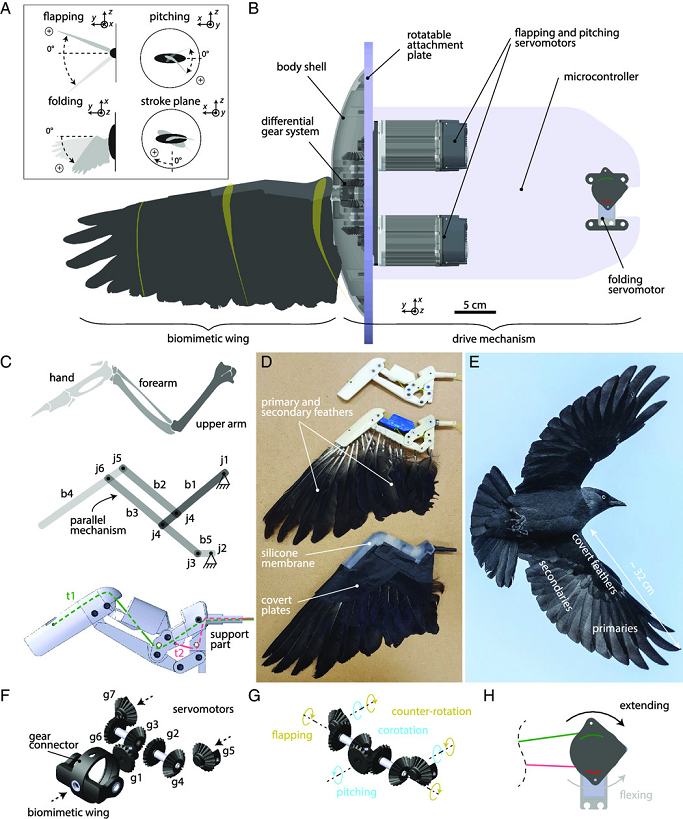
В рассматриваемом нами сегодня труде ученые решили охарактеризовать биогибридное роботизированное машущее крыло, способное к независимым и одновременным взмахам, тангажу и складыванию, а также к взмахам под разными углами (1A). Это устройство позволило ученым управлять основными кинематическими параметрами, которые птицы используют для адаптации аэродинамических сил.
Данная система оснащена натуральными перьями и обеспечивает значительно более высокую кинематическую сложность и аэродинамический контроль, чем предыдущие роботы, вдохновленные птицами, независимо от того, летают они свободно или устанавливаются в аэродинамических трубах.
Результаты исследования
Изучаемый робот состоит из сменного биогибридного крыла (1C и 1D), созданного по образцу галки (Corvus monedula, 1E), и приводного механизма для управления движением (1B). Внутреннее крыло состоит из параллельного механизма из пяти искусственных костей (b1–b5 на 1C), который может складываться в одной плоскости. Аэродинамическая поверхность состоит из 19 маховых перьев галки (первичных и вторичных; 1D) и искусственных пластин, которые имитируют кроющие перья и заключают в себе параллельный механизм, используемый для складывания крыльев. Перья крепко приклеены к костям b4 и b3, а кроющие пластины к костям b4, b2 и b1. Подобно своему птичьему аналогу, раскрытое крыло имеет длину 0.33 м и соотношение сторон 5.1 (1E, таблица №1).
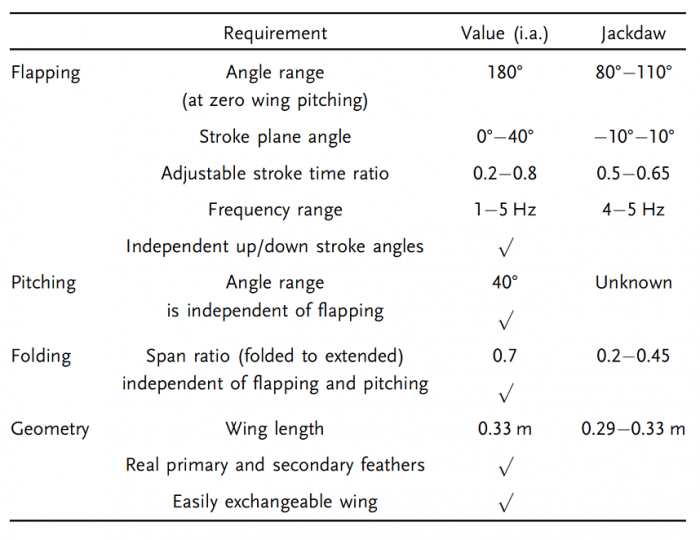 Таблица №1
Таблица №1
Приводной механизм состоит из дифференциальной зубчатой передачи (1F), приводимой в действие двумя встроенными серводвигателями для взмахов и тангажа крыльев (1G), и отдельного цифрового серводвигателя для складывания крыльев (1H). Этот приводной механизм обеспечивает любую комбинацию взмахов, тангажа и складывания крыльев в пределах технических характеристик робота (таблица №1).
Робот был прикреплен к стене аэродинамической трубы с помощью вращающейся крепежной пластины (1B), которую можно использовать для изменения угла плоскости хода робота (0–40°; 1A).
 Изображение №2
Изображение №2
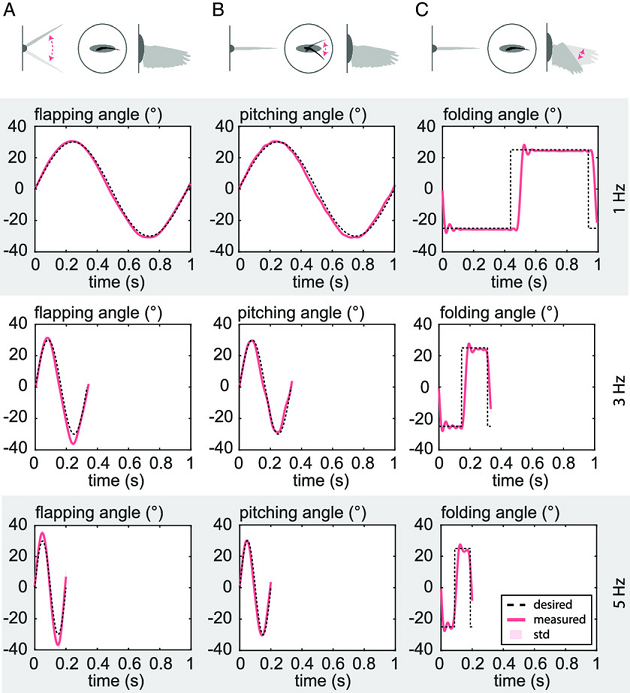
Ученые оценили угловую точность крыла, сравнив желаемое и фактическое движение, используя оптическую систему захвата движения. Было проведено несколько экспериментов со взмахами, тангажом или складыванием (вверху на 2A–2C). Применялись частоты циклов 1, 3 и 5 Гц и скорость ветра 0 и 8 м/с. Была проведена оценка восьми полных циклов (n = 8) для каждого эксперимента. Ниже представлены результаты для опытов при 0 м/с.
- Источник(и):
- Войдите на сайт для отправки комментариев
