Рой дронов локализовал утечку газа
Инженеры из Нидерландов, Испании и США создали рой небольших дронов, умеющий самостоятельно находить утечку газа в помещениях. Из-за небольшого размера дроны не строят карту помещения, но благодаря применению лазерных дальномеров и алгоритма, похожего на принцип поиска еды птицами, успешно справляются с поиском места утечки, рассказывают авторы статьи в arXiv.org.
Поиск места утечки газа — это потенциально опасная задача, потому что смесь горючего газа с воздухом в достаточном соотношении при искре может вызвать взрыв, а негорючий газ может привести к удушению. Соответственно эту задачу логично поручить роботам или дронам. Поскольку утечки, как правило, происходят и наиболее опасны в помещениях, это сразу отсекает навигацию по GPS и аналогам, вынуждая использовать локальную систему навигации.
Группа инженеров под руководством Гвидо де Крона (Guido de Croon) из Делфтского технического университета решила использовать для этой задачи не один дрон с мощным компьютером для качественной локальной навигации, а рой дронов, компенсирующих меньшую вычислительную мощность коллективным взаимодействием.
Авторы использовали часто применяемый для отработки алгоритмов исследовательский микродрон CrazyFlie. Они оснастили квадрокоптер датчиком газа, определяющим наличие примесей в воздухе, а также лазерными дальномерами по бокам и датчиками оптического потока. Поскольку в дроне установлен слабый одноядерный процессор с частотой 168 мегагерц и один мегабайт памяти, на нем невозможно использовать стандартный алгоритм одновременной локализации и создания карты (SLAM), а его грузоподъемности не хватает для установки более мощного вычислителя.
Вместо этого разработчики решили использовать несколько аппаратов и метод роя частиц. Этот метод изначально был разработан для имитации поведения стаи птиц при поиске еды. Суть метода заключается в том, что каждый элемент роя двигается, наблюдает состояние некоего параметра (в данном случае — концентрацию газа в воздухе) и сообщает о нем остальным элементам, после чего рой определяет наилучшее направление движения (с наибольшей концентрацией) и снова наблюдает за измеряемым параметром. В задачах оптимизации этот метод позволяет быстро найти локальный минимум функции, а задаче поиска утечки — найти ее источник, возле которого концентрация газа будет максимальной.
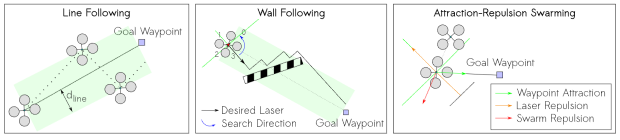 Три состояния дрона / Bardienus Duisterhof et al. / arXiv.org, 2021
Три состояния дрона / Bardienus Duisterhof et al. / arXiv.org, 2021
Алгоритм, разработанный инженерами, периодически создает для каждого из трех дронов (потенциально их может быть гораздо больше, но авторы использовали это количество) новую точку, в которую он должен прийти. Поскольку дроны не используют SLAM, они лишь отслеживают оптический поток и за счет этого рассчитывают дальность своего перемещения. Дрон может находиться в трех состояниях: следовать в новую точку вдоль прямой, следовать в новую точку, огибая стену, и «отталкиваться» от другого дрона, если он подлетел слишком близко. Во время полета дроны обмениваются данными о концентрации газа через UWB и благодаря этому ищут новые оптимальные точки для поиска утечки.
Перед реальными полетами авторы обучили алгоритмы в симуляции, в результате чего получили более эффективные параметры для них. Инженеры протестировали рой в четырех помещениях размером 10×10 метров с источником утечки изопропанола. В 11 из 12 тестов дронам удалось локализовать источник с точностью два метра.
- Источник(и):
- Войдите на сайт для отправки комментариев
