Создан робот-оригами, приводимый в действие внешним магнитным полем
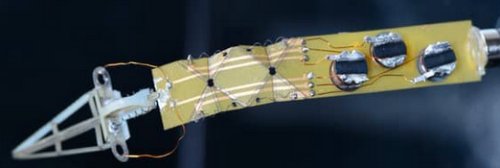
Исследователи из Гарвардского университета создали небольшого робота-манипулятор, которому для работы не требуется никаких батарей и источников энергии других типов. «Рука» этого робота, состоящая из нескольких «суставов», «мускулы» и его захват приводятся в действие и управляются при помощи беспроводных технологий на базе переменного магнитного поля. Конструкция этого робота вдохновлена японским традиционным искусством оригами, искусства придавать листу бумаги сложные трехмерные формы путем создания сгибов и складок в определенных местах. И этот робот-оригами способен совершать движения и перемещения в пределах от нескольких миллиметров до нескольких сантиметров.
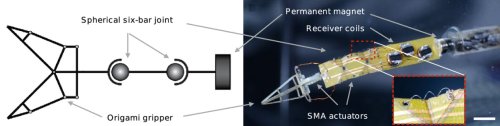
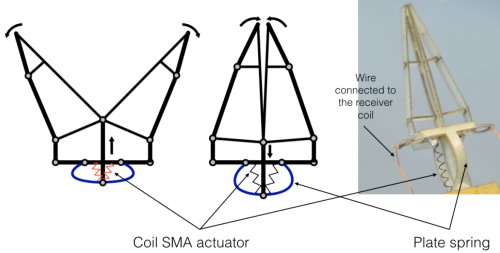
Как уже упоминалось выше, в действие этого робота приводит внешняя катушка индуктивности, имеющая собственный источник энергии и электронную схему управления. Эта «главная» катушка излучает переменное магнитное поле низкой частоты, воздействие которого приводит к возникновению электрического тока в небольших катушках, установленных на роботе. Индуцированный электрический ток проходит через спиральные проводники, изготовленные из сплава с памятью формы, и нагревает, заставляя их сокращаться. А эти своего рода искусственные мускулы заставляют манипулятор изгибаться и перемещаться.
Каждая из катушек, установленных на роботе, настроена на свою резонансную частоту. Изменяя частоту поля, вырабатываемого излучающей катушки, исследователи могут выборочно активировать те или иные искусственные мускулы, заставляя робота совершать заданные перемещения, открыть или закрыть его захват. Когда главная катушка перестает вырабатывать магнитное поле, все искусственные мускулы робота «расслабляются» и робот возвращается в исходное состояние, а его захват – смыкается.
Естественно, что глядя на приведенные здесь снимки и просмотрев видеоролик, очень тяжело представить себе будущее таких робототехнических систем. Однако, новая «магнитная» технология может быть миниатюризирована до совсем крошечных масштабов и ее можно будет использовать для приведения в действие и контроля миниатюрных медицинских роботов, выполняющих определенные действия прямо внутри тела человека.
«Размеры современных медицинских устройств зачастую определяются минимальными размерами батарей, которые приводят их в действие. Такие же роботы-оригами, приводимые в действие энергией магнитного поля, могут стать основой сверхминиатюрных устройств, предлагающих новые, минимально агрессивные методы лечения и проведения хирургических операций» – рассказывает Дональд Ингбер (Donald Ingber), профессор из Гарвардского университета.
- Источник(и):
- Войдите на сайт для отправки комментариев
