Микророботы-инфузории - самые быстрые и маневренные микророботы, способные действовать внутри живого организма
Мы уже неоднократно рассказывали нашим читателям о различных видах микророботов с дистанционным управлением, предназначенных для доставки лекарственных препаратов и выполнения микрохирургических операций прямо внутри тела человека. Все эти роботы имеют собственные микродвигатели, которые очень часто являются копиями двигательных систем различных живых организмов и которые позволяют микророботам перемещаться внутри кровотока с той или иной эффективностью. Своего рода рекордсменом в скорости передвижения является новый микроробот, созданный специалистами Отдела робототехники (Department of Robotics Engineering) Исследовательского института в Тэгу (Daegu Gyeongbuk Institute of Science and Technology), Республика Корея. Этот микроробот является «механическим воплощением» микроорганизма Paramecium, известного под названием инфузории-туфельки, и он может перемещаться в восемь раз быстрее, чем его ближайшие конкуренты.
Основной проблемой, с которой сталкиваются разработчики подобных микророботов, заключается в том, что этим микророботам предстоит действовать в среде кровотока, которая является более вязкой, нежели простая вода. Некоторые виды движения, используемые обычными морскими и речными животными, не обеспечивают высокой эффективности в вязкой жидкой среде, поэтому инженеры все чаще и чаще используют способы, которыми передвигаются различные виды микроорганизмов. И инфузория-туфелька, имеющая множество подвижных «ресничек», является одним из наиболее шустрых и проворных микроорганизмов.
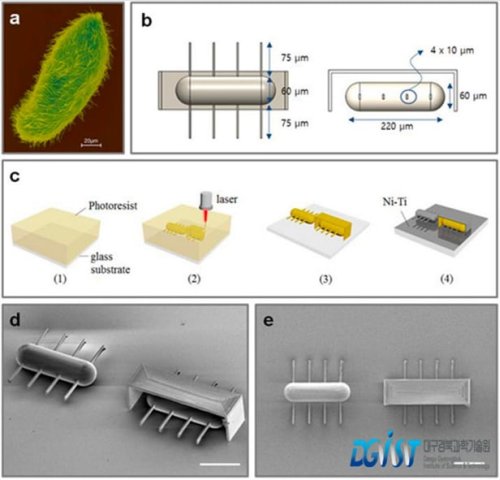
К сожалению, изготовление аналогов подвижных «ресничек» долгое время находилось далеко за пределами технологических возможностей ученых. И лишь не так давно на свет появилась технология трехмерной лазерной литографии, при помощи которой южнокорейские исследователи создали полимерный корпус микроробота, имеющий несколько тонких и подвижных «ресничек». На эти выступы был нанесен слой титана и никеля для того, чтобы обеспечить возможность управления микророботом при помощи магнитного поля и сделать его максимально биологически совместимым.
 Микророботы-инфузории
Микророботы-инфузории
Как и в других подобных случаях корейские исследователи использовали катушки электромагнитов, переменное поле которых заставляло колебаться «реснички» микророботов с определенной частотой и амплитудой. Проведенные испытания показали, что микроробот, размер которого составляет 220 микрометров, способен двигаться со скоростью 340 микрометров в секунду. При этом, его маневренность во много раз превышает маневренность других микророботов с внешним магнитным управлением. Двигаясь на максимальной скорости, микроробот-инфузория может моментально изменить направление движения на 120 градусов и это позволяет ему эффективно маневрировать в сложной сети мельчайших кровеносных сосудов.
Высокая эффективность двигательной системы микроробота-инфузории позволяет ему перемещать полезный груз достаточно большого веса. В данном случае этим полезным грузом могут являться не только капсулы с лекарственными препаратом, но и более сложные микроустройства, которые, к примеру, будут смешивать лекарственные препараты из компонентов прямо возле точки их применения. А полимер, из которого изготовлен микроробот, растворится и исчезнет без следа после того, как этот робот выполнит поставленную перед ним задачу.
А следующими шагами, которые сделают южнокорейские исследователи, станет разработка ряда алгоритмов, которые будут управлять действиями микророботов-инфузорий и которые будут нацелены на выполнение различных практических задач внутри тела человека.
- Источник(и):
- Войдите на сайт для отправки комментариев
